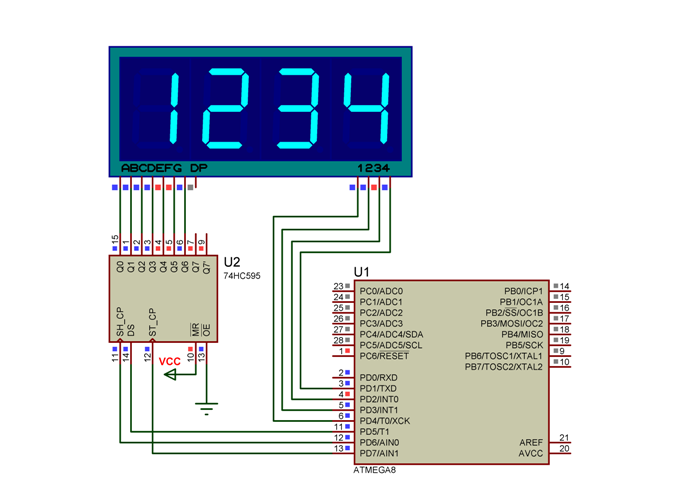
В первом примере рассмотрим подключение четырехразрядного индикатора с использованием одного сдвигового регистра 74HC595. Аноды индикатора соединены к выводам микроконтроллера (через токоограничительные резисторы или транзисторные ключи, я для примера подключил напрямую). Таким образом сегменты управляются через сдвиговый регистр, а аноды переключаются выставлением в порт микроконтроллера единички. Как видно на схеме, для подключения такого индикатора потребуется 7 ножек микроконтроллера и с увеличением числа разрядов, количество требуемых ног будет расти.
$regfile = "m8def.dat"
$crystal = 8000000
Config Portd = Output
'значение этой переменной должны будем вывести на индикатор
Dim A As Word
'переменные для преобразования исходного числа
Dim N1 As Byte
Dim N2 As Byte
Dim N3 As Byte
Dim N4 As Byte
Dim M1 As Integer
Dim M2 As Integer
Dim M3 As Integer
Dim M4 As Integer
'для значений отправляемых в регистр
Dim R As Byte
Do
A = 1234 'значение переменной для вывода на индикатор
'раскладываем число на составляющие
M1 = A
M2 = M1
M3 = M1
M4 = M1
M1 = M1 / 1000 'M1 = 1234/1000 = 1,234
N1 = Abs(m1) 'N1 = Abs (1,234) = 1
M2 = M2 Mod 1000 'M2 =1234 Mod 1000 = 234
M2 = M2 / 100 'M2 = 234 / 100 = 2,34
N2 = Abs(m2) 'N2 = Abs (2,34) = 2
M3 = M3 Mod 100
M3 = M3 / 10
N3 = Abs(m3)
M4 = M4 Mod 10
N4 = Abs(m4)
'начинаем задвигать данные в регистр
Portd = &B00000010
R = Lookup(n4 , Numbers) 'первыми идут единицы
Gosub Registr 'подпрограмма отправки данных в регистр
Portd = &B00000100
R = Lookup(n3 , Numbers) 'отправляем десятки
Gosub Registr
Portd = &B00001000
R = Lookup(n2 , Numbers) 'отправляем сотки
Gosub Registr
Portd = &B00010000
R = Lookup(n1 , Numbers) 'отправляем тысячи
Gosub Registr
Loop
End 'конец программы
'массив с кодами для семисегментника
Numbers:
Data &B11000000 '0
Data &B11111001 '1
Data &B10100100 '2
Data &B10110000 '3
Data &B10011001 '4
Data &B10010010 '5
Data &B10000010 '6
Data &B11111000 '7
Data &B10000000 '8
Data &B10010000 '9
'подпрограмма отправки данных в регистр
Registr:
Shiftout Portd.5 , Portd.6 , R , 1 'задвигаем данные
Pulseout Portd , 7 , 10 'защелкиваем регистр
Waitms 5
Return
$crystal = 8000000
Config Portd = Output
'значение этой переменной должны будем вывести на индикатор
Dim A As Word
'переменные для преобразования исходного числа
Dim N1 As Byte
Dim N2 As Byte
Dim N3 As Byte
Dim N4 As Byte
Dim M1 As Integer
Dim M2 As Integer
Dim M3 As Integer
Dim M4 As Integer
'для значений отправляемых в регистр
Dim R As Byte
Do
A = 1234 'значение переменной для вывода на индикатор
'раскладываем число на составляющие
M1 = A
M2 = M1
M3 = M1
M4 = M1
M1 = M1 / 1000 'M1 = 1234/1000 = 1,234
N1 = Abs(m1) 'N1 = Abs (1,234) = 1
M2 = M2 Mod 1000 'M2 =1234 Mod 1000 = 234
M2 = M2 / 100 'M2 = 234 / 100 = 2,34
N2 = Abs(m2) 'N2 = Abs (2,34) = 2
M3 = M3 Mod 100
M3 = M3 / 10
N3 = Abs(m3)
M4 = M4 Mod 10
N4 = Abs(m4)
'начинаем задвигать данные в регистр
Portd = &B00000010
R = Lookup(n4 , Numbers) 'первыми идут единицы
Gosub Registr 'подпрограмма отправки данных в регистр
Portd = &B00000100
R = Lookup(n3 , Numbers) 'отправляем десятки
Gosub Registr
Portd = &B00001000
R = Lookup(n2 , Numbers) 'отправляем сотки
Gosub Registr
Portd = &B00010000
R = Lookup(n1 , Numbers) 'отправляем тысячи
Gosub Registr
Loop
End 'конец программы
'массив с кодами для семисегментника
Numbers:
Data &B11000000 '0
Data &B11111001 '1
Data &B10100100 '2
Data &B10110000 '3
Data &B10011001 '4
Data &B10010010 '5
Data &B10000010 '6
Data &B11111000 '7
Data &B10000000 '8
Data &B10010000 '9
'подпрограмма отправки данных в регистр
Registr:
Shiftout Portd.5 , Portd.6 , R , 1 'задвигаем данные
Pulseout Portd , 7 , 10 'защелкиваем регистр
Waitms 5
Return
Такой метод позволяет немного сократить количество необходимых ног микроконтроллера при подключении к нему семисегментных индикаторов. Но сразу напрашивается решение также подключить аноды (или катоды) индикатора через сдвиговый регистр. Этот метод сейчас и рассмотрим:
Пример №2 >>>
