Как было сказано в прошлой статье этот интерфейс описывает передачу между устройствами, одно из которых является ведущим (мастером) и одно ведомым (подчиненым). Ведомых устройств в системе может быть сколько угодно, а вот ведущим может быть одно и только одно устройство.
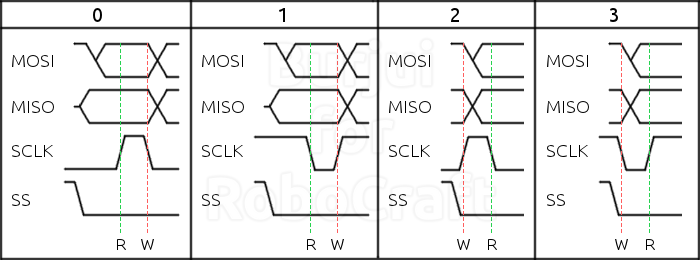
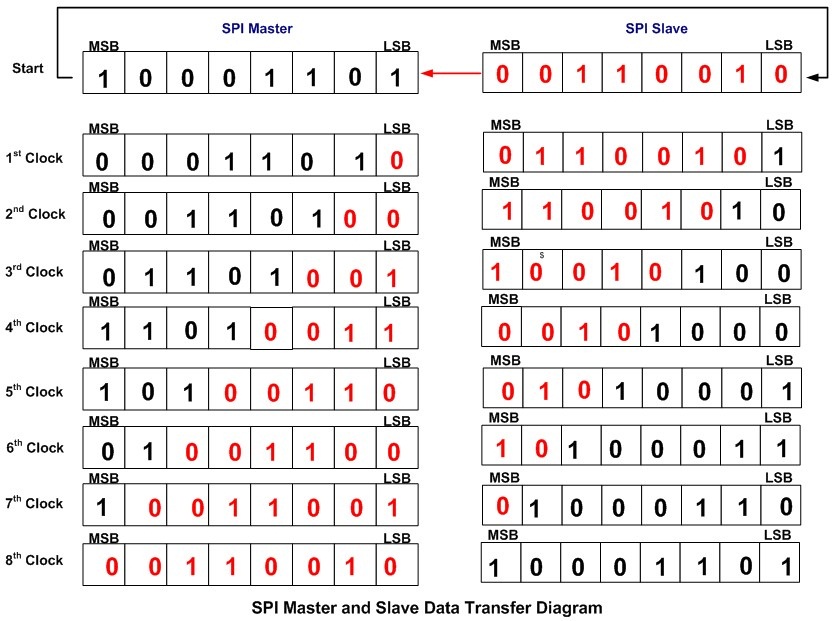
В этой системе активным является ведущее устройство. Оно предоставляет тактовый сигнал, на основе которого осуществляется последовательная передача данных. Ведомое устройство не может генерировать тактовый сигнал, в следствие чего не может самостоятельно инициировать активность и передавать данные. Ведомое устройство просто принимает и отправляет данные в то время, когда ведущее устройство генерирует тактовый сигнал. Однако, ведущее устройство генерирует тактовый сигнал только при передаче данных. Это означает, что ведущее устройство для того, чтобы получить данные из ведомого устройства, должно послать данные ведомому устройству.
!! Если периферия не умеет переключаться в режим мастера (среди различных датчиков сплошь и рядом) тут надо усвоить один принцип, что для чтения данных необходимо послать датчику произвольные данные. И пока ведущий шлет в подчиненного мусор, подчиненный будет отсылать ведущему нужные данные.
FIFO - first in, first out один из важнейших принципов данного интерфейса. Очень похоже на работу буфера в микросхеме 74lc595
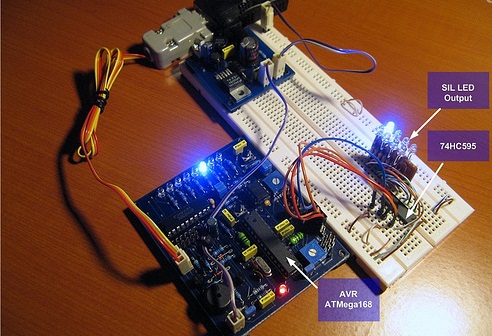
Итоговый результат на макетной плате
А если вдруг понадобится режущий инструмент то можно обратиться на предприятие "Пин-инструмент" который поставляет своим клиентам токарный патрон бизон, резцы проходные, шлифовальные круги, абразивный инструмент и иные инструменты.
