|
Использование бесщеточных двигателей постоянного тока (BLDC) становится все более актуальным. Но для их управления обычно требуется информация о положении ротора для выбора подходящего угла коммутации. Обычно для этого используется датчик эффекта Холла для определения положения ротора. Но часто желательна в чувствительных к затратам приложениях схема коммутации без датчика . Схема, описанная здесь, использует ИС драйвера DRV10866 для управления небольшим вентилятором BLDC без использования каких-либо датчиков положения. Скорость вентилятора BLDC можно плавно изменять, без обычных шагов, связанных с обычным вентилятором переменного тока.
Схема и работа
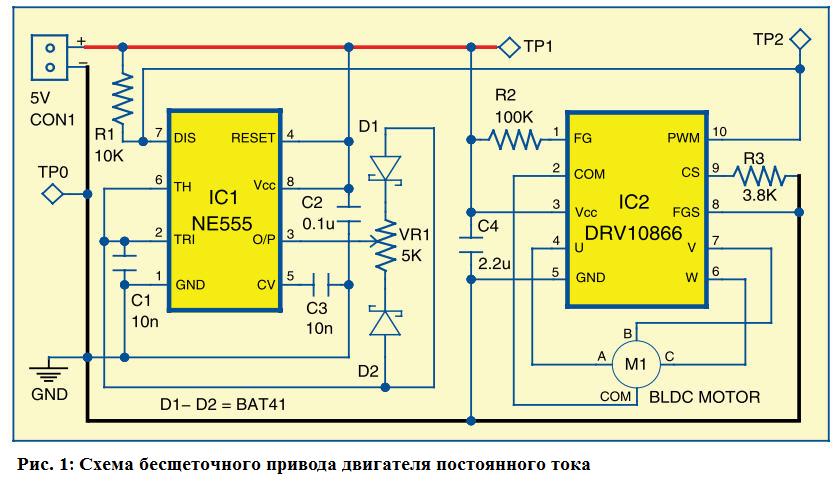
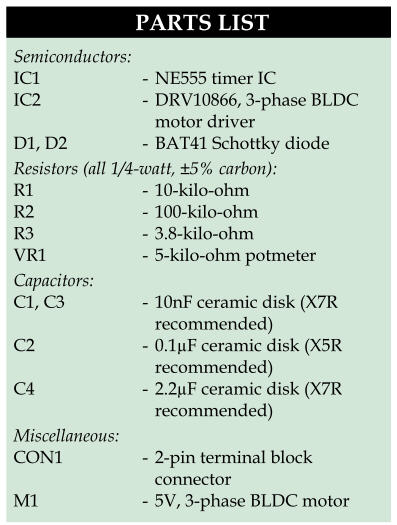
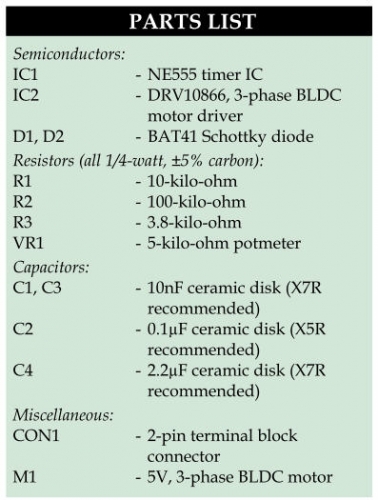
На рис. 1 показана схема драйвера мотора BLDC без датчика. Схема построена на NE555 (IC1), DRV10866 (IC2) и нескольких других компонентах.Используется драйвер DRV10866 от Texas Instruments для привода небольшого трехфазного двигателя BLDC (M1).
Схема состоит из трехфазного привода двигателя без датчика со встроенными силовыми МОП-транзисторами, имеющими ток возбуждения до пика 680 мА. DRV10866 специально разработан для двигателей с малым количеством компонентов.

Для управления трехфазным двигателем используется схема обратной ЭДС без датчика 150 °. На контакте 1 IC2 используется подтягивающий резистор 100 кОм (R2). Контакты 2, 4, 7 и 6 IC2 подключены к общей фазе A, фазе B и фазе C двигателя BLDC соответственно.
Вывод 10 на IC2 подключен к выводу 7 на IC1 для получения сигнала широтно-импульсной модуляции (ШИМ) от IC1 для управления скоростью двигателя BLDC.
Выходной сигнал (ШИМ) доступен на выводе 7 микросхемы (DIS), а не на обычном выходном выводе 3 микросхемы. Рабочий цикл сигнала ШИМ 25 кГц (прибл.) Можно регулировать от 5% до 95% с помощью потенциометра VR1. Скорость двигателя BLDC может контролироваться путем изменения коэффициента заполнения сигнала ШИМ.Поворот VR1 против часовой стрелки снижает рабочий цикл, что, в свою очередь, снижает скорость двигателя, и наоборот.
Конструкция и налаживание
В архиве находится плата в формате Sprint-Layout6,а на рис. 2 показано расположение компонентов на плате. IC2 должен быть установлен на стороне пайки платы.
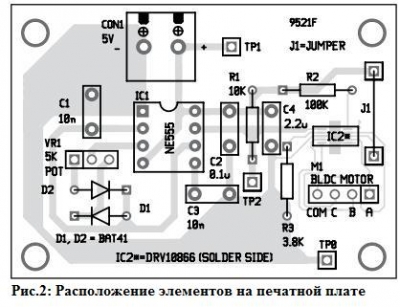
Чтобы проверить правильность функционирования цепи, проверьте напряжение 5 В для цепи на TP1 относительно TP0. Поверните VR1 по часовой стрелке или против часовой стрелки, чтобы увеличить или уменьшить скорость двигателя.

Материал взят из журнала Electronics For You за 2014.6
|