| Главная » Статьи » Как подключить |
Работа с магнитометром HMC5883L
Сегодня будет описание работы одного
очень интересного датчика - магнитометра HMC5883L. Как видно из названия
этот датчик измеряет магнитное поле, причем делает это в трех осях. Это
дает возможность получать трехмерную картину направленности магнитного
поля и его величину. А если проще, то с помощью этого датчика можно
собрать свой цифровой компас. Интересно как с ним работать? Тогда читаем
дальше! HMC5883L достаточно распространенный и недорогой датчик, для общения с микроконтроллером используется стандартный I2C интерфейс. Чип выпускается в крошечном 16-и выводном корпусе LPCC размерами 3х3 мм. 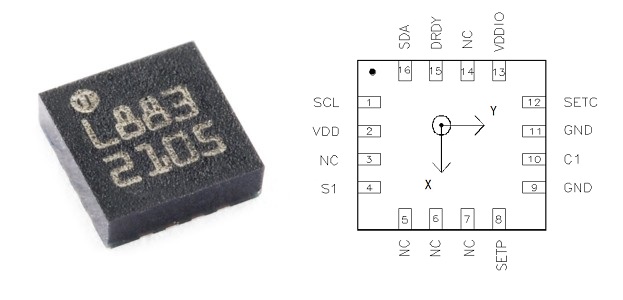 Обозначение выводов:
В общем обвязка у сенсора минимальная, всего два конденсатора. Не считая двух pullup резисторов, необходимых для шины I2C. В простейшем случае, когда порты ввода/вывода запитаны напряжением питания схемы и не используется вывод прерывания, схема подключения будет выглядеть так: 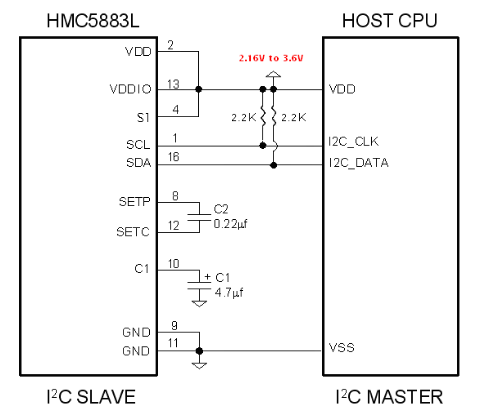 Работа по шине I2C Как и любое устройство, работающее по интерфейсу I2C, датчик имеет свой собственный уникальный адрес для работы. HMC5883L присвоен адрес 0х1E. С восьмым битом записи/чтения адрес будет 0х3D для чтения и 0х3C для записи. Карта регистров датчика представлена в таблице ниже: 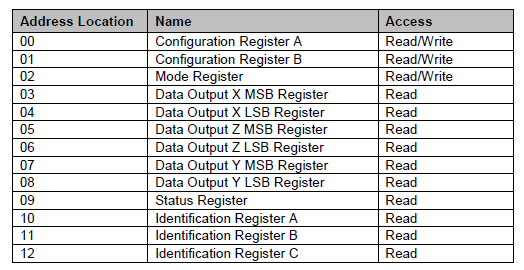 Как видно, для настройки датчика доступны регистры (это те куда мы можем что-то записать) находящиеся на адресах 00 (configuration register A), 01 (configuration register B) и 02 (mode register). Configuration Register A (CRA)  Первый из доступных, для настройки датчика, регистров. Каждый бит имеет свое имя, для того чтобы было видно с каким еще битом в регистре он связан (например, биты CRA6 и CRA5 имеют общее имя MA1 и MA0 соответственно, так как отвечают за один и тот же параметр) CRA7 - зарезервированный бит и пока не используется CRA6|CRA5 - устанавливают число замеров (семплов) перед выдачей результата измерения. эти биты могут принимать значения: 00 = 1(Default); 01 = 2; 10 = 4; 11 = 8 Пример: чтобы установить 4 семпла записываем в CRA6 единицу, a в CRA5 ноль. CRA4|CRA3|CRA2 - устанавливают с какой скоростью будут записываться данные в регистры считывания данных (Data Output Registers). 000 - 0,75 Гц 001 - 1,5 Гц 010 - 3 Гц 011 - 7,5 Гц 100 - 15 Гц (дефолтное значение) 101 - 30 Гц 110 - 75 Гц 111 - зарезервировано Пример: для того чтобы увеличить скорость записи данных до 75 Гц записываем в CRA4 единицу, в CRA3 единицу, в CRA2 ноль. CRA1|CRA0 - настраивают тип измерения. Тут какие-то технические заморочки с импедансом в магниторезистивной нагрузке датчика в каждой из осей. Не стал разбираться в деталях, оставил значение регистров по умолчанию (00 - нормальный режим измерения) . Пример: настроим полностью регистр А, установим количество семплов равным 8 , скорость записи данных 3 Гц, нормальный тип измерения. Для этого мы должны отправить в регистр 8 бит данных, в двоичном представлении это будет: &b01101000. Configuration Register B (CRB)  В регистре B настраивается чувствительность датчика к магнитному полю. За эти установки отвечают биты CRB7|CRB6|CRB5. Остальные 5 бит не используются, но для корректной работы они должны быть забиты нулями. Зависимость чувствительности (Lsb/Gauss) датчика от установленных битов CRB7|CRB6|CRB5 000 -1370 001 -1090 (дефолтное значение) 010 - 820 011 - 660 100 - 440 101 - 390 110 - 330 111 - 230 Пример: установим максимальную чувствительность датчика, для этого отправим в регистр B бинарное значение &b00000000 Mode Register (MR)  В последнем оставшемся в нашем распоряжении регистре, настраиваются такие параметры как скорость работы на шине I2C и режим работы датчика. Высокоскоростной режим работы I2C (3400 кГц) устанавливается записью в бит MR7 единицы. MD1|MD0 устанавливают режим работы датчика: 00 - режим непрерывного измерения. 01 - режим единичного измерения (в этом режиме датчик работает умолчанию). После измерения и записи результата в регистр вывода данных датчик уходит в режим ожидания (Idle) 10 - погружает датчикв режим ожидания. Потребление в этом режиме падает до 2 мкА 11 - также погружает датчик в режим ожидания. Пример: установим высокоскоростное соединение датчика с микроконтроллером на скорости 3400кГц и запустим режим непрерывного измерения. Для этого запишем в регистр бинарное значение &b10000000. Измеренные по трем осям данные забираются из соответствующих регистров, для каждой из осей данные состоят из двух байт - старшего и младшего. Для получения результата их необходимо сложить, но это уже очевидные вещи поэтому приступим непосредственно к коду и железу. Для того чтобы самостоятельно не паять эту букашку купил на ebay вот такую готовую платку: 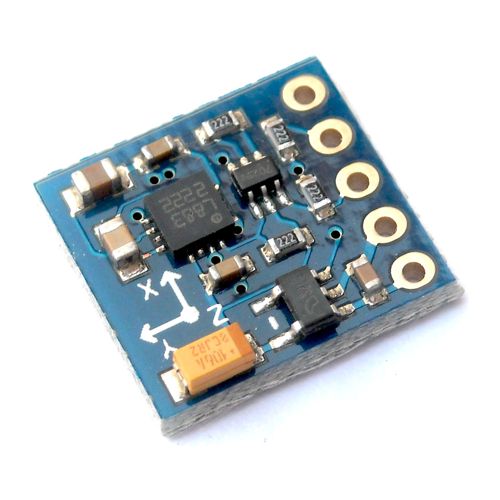 Подключается плата с датчиком напрямую к микроконтроллеру, подтягивающие резисторы ставить не нужно, они уже имеются на плате: 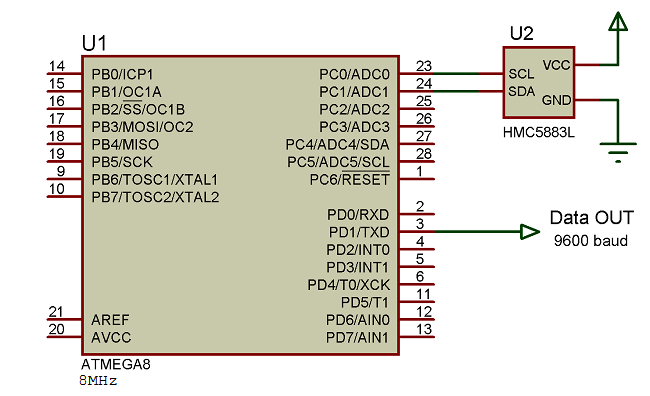 Исходник в Bascom-AVR для работы с датчиком HMC5883L. В программе данные полученные с датчика (значение магнитного поля на каждой из осей и рассчитанный угол относительно севера) отправляются в терминал.
$regfile = "m8def.dat"
$crystal = 8000000 $hwstack = 64 $swstack = 64 $framesize = 150 $baud = 9600 'переменные и констаннты Dim Hmc_x As Integer Dim Hmc_xl As Byte At Hmc_x + 0 Overlay Dim Hmc_xh As Byte At Hmc_x + 1 Overlay Dim Hmc_y As Integer Dim Hmc_yl As Byte At Hmc_y + 0 Overlay Dim Hmc_yh As Byte At Hmc_y + 1 Overlay Dim Hmc_z As Integer Dim Hmc_zl As Byte At Hmc_z + 0 Overlay Dim Hmc_zh As Byte At Hmc_z + 1 Overlay Dim X As Single Dim Y As Single Dim Z As Single Dim Angle As Single Dim Angle_str As String * 6 Const Hmc_w = &H3C 'адрес датчика + бит записи Const Hmc_r = &H3D 'адрес датчика + бит чтения 'конфигурация I2C Config Scl = Portc.0 'линия тактовых импульсов Config Sda = Portc.1 'линия данных I2cinit Gosub Hmc_setup 'ГЛАВНЫЙ ЦИКЛ Do Gosub Hmc_read X = Hmc_x Y = Hmc_y Z = Hmc_z Angle = Atn2(y , X) Angle = Angle * 57.2957795 ' (180 / 3.141592) Angle = Angle + 180 Angle_str = Fusing(angle , "#.#") Angle_str = Angle_str + "°" 'выводим данные в терминал Print "x: " ; X ; " "; Print "y: " ; Y ; " "; Print "z: " ; Z ; " "; Print "Angle: " ; Angle_str Waitms 500 Loop End 'инициализация магнитометра и его настройка Hmc_setup: I2cstart I2cwbyte Hmc_w I2cwbyte &H00 'записываем с нулевого адреса I2cwbyte &B01011000 'регистр А. 4 сэмпла, 75Гц, нормальный режим I2cwbyte &H00100000 'регистр B.усиление 1090 (по умолчанию) I2cwbyte &H00000000 'устанавливаем режим постоянного измерения I2cstop Return 'чтение данных Hmc_read: I2cstart I2cwbyte Hmc_w I2cwbyte &H03 'начинаем читать данные с регистра хранения данных I2cstart I2cwbyte Hmc_r I2crbyte Hmc_xh , Ack 'читаем старший байт x I2crbyte Hmc_xl , Ack 'читаем младший байт x I2crbyte Hmc_zh , Ack 'читаем старший байт z I2crbyte Hmc_zl , Ack 'читаем младший байт z I2crbyte Hmc_yh , Ack 'читаем старший байт y I2crbyte Hmc_yl , Nack 'читаем младший байт y I2cstop Return А так выглядят данные отправленные в терминал 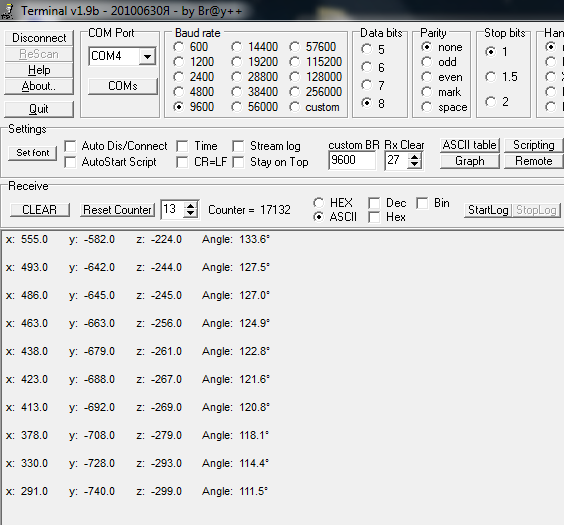 Документация на датчик HMC5883L (PDF) | |
| Просмотров: 47057 | Комментарии: 14 | Теги: | Рейтинг: 5.0/3 |
| Всего комментариев: 14 | |||||||||||||||
| |||||||||||||||



авторизация
рубрики
| Проекты [46] |
| Как подключить [32] |
| Инструменты [3] |
| Полезная информация [18] |
| Объявления [3] |
метки
AVRproject.ru - проекты на микроконтроллерах AVR.
Использование материалов сайта допускается только при использовании ссылки на AVRproject.ru © 2011-2026

Использование материалов сайта допускается только при использовании ссылки на AVRproject.ru © 2011-2026