| Всех приветствую! Исследуя в очередной раз просторы Интернета наткнулся на статью, которая меня заинтересовала. Что из этого вышло? Читайте дальше.
В статье рассказывается, как можно самому собрать очень интересную игрушку (в моём случае две, но об этом позже). Почитал, подумал и решил тоже собрать, только не так, как автор статьи: не переделывать модели (по возможности), а подгонять железо под модели. Страница робота на сайте Thingiverse.com.
Сервоприводы.
От всего, что идет в комплекте с сервами, нужно только это:
Саморезы.
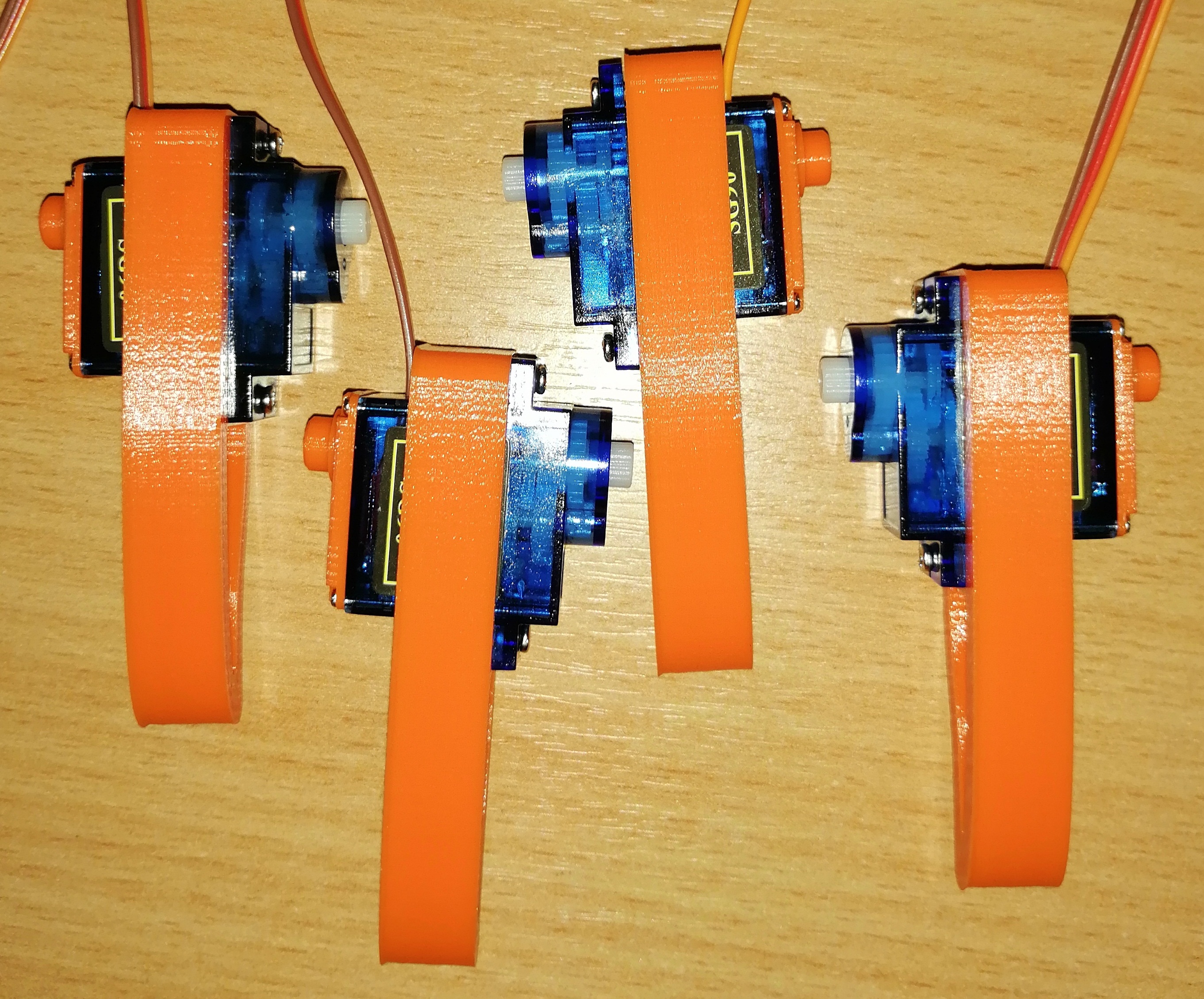
Разбираем все сервы, снимаем нижние крышки и напильником делаем их все ровными:
Если крышки ровные, пропускаем этот шаг. Пока сервы разобраны, решил укоротить провода на семь сантиметров:
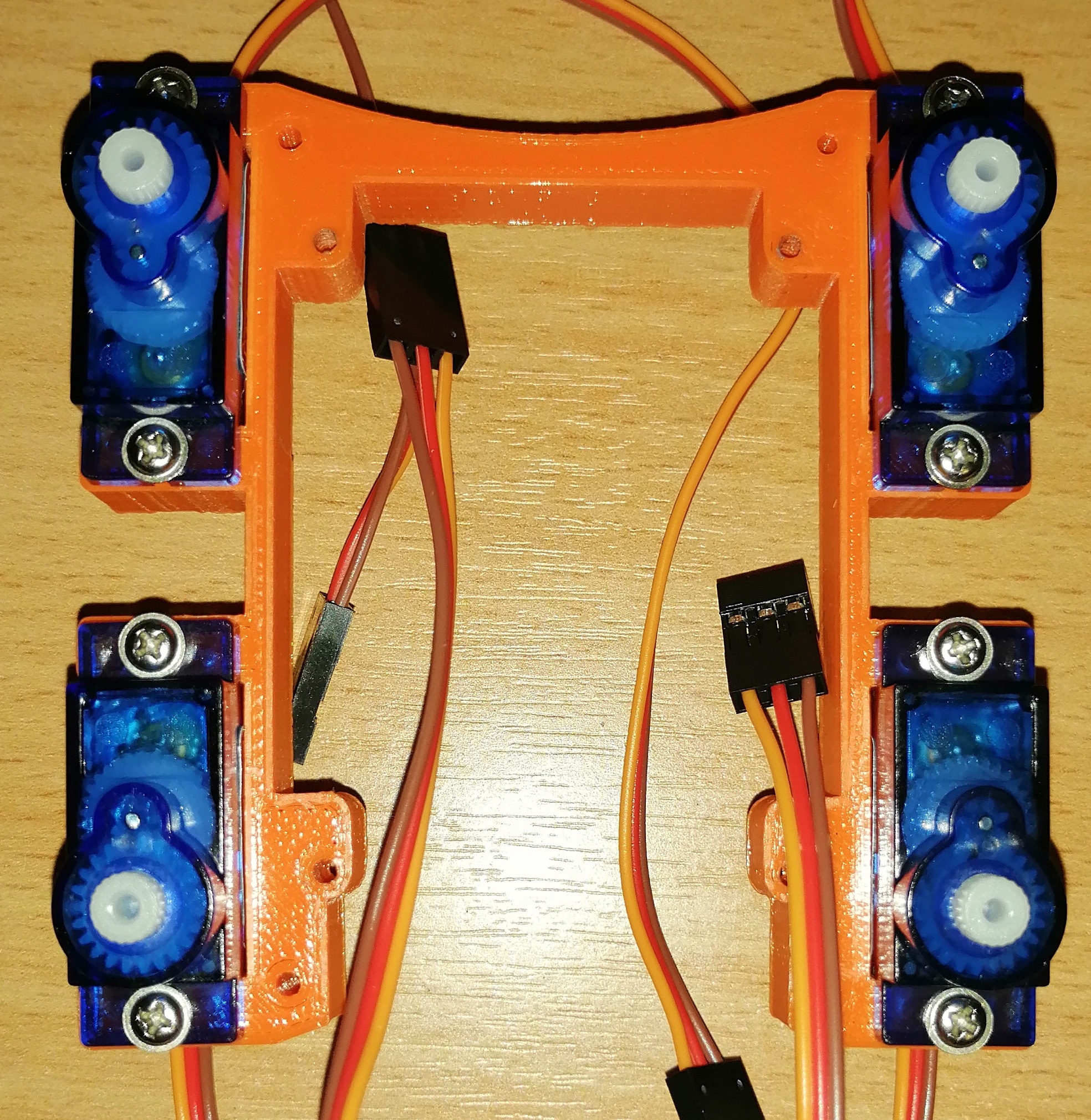
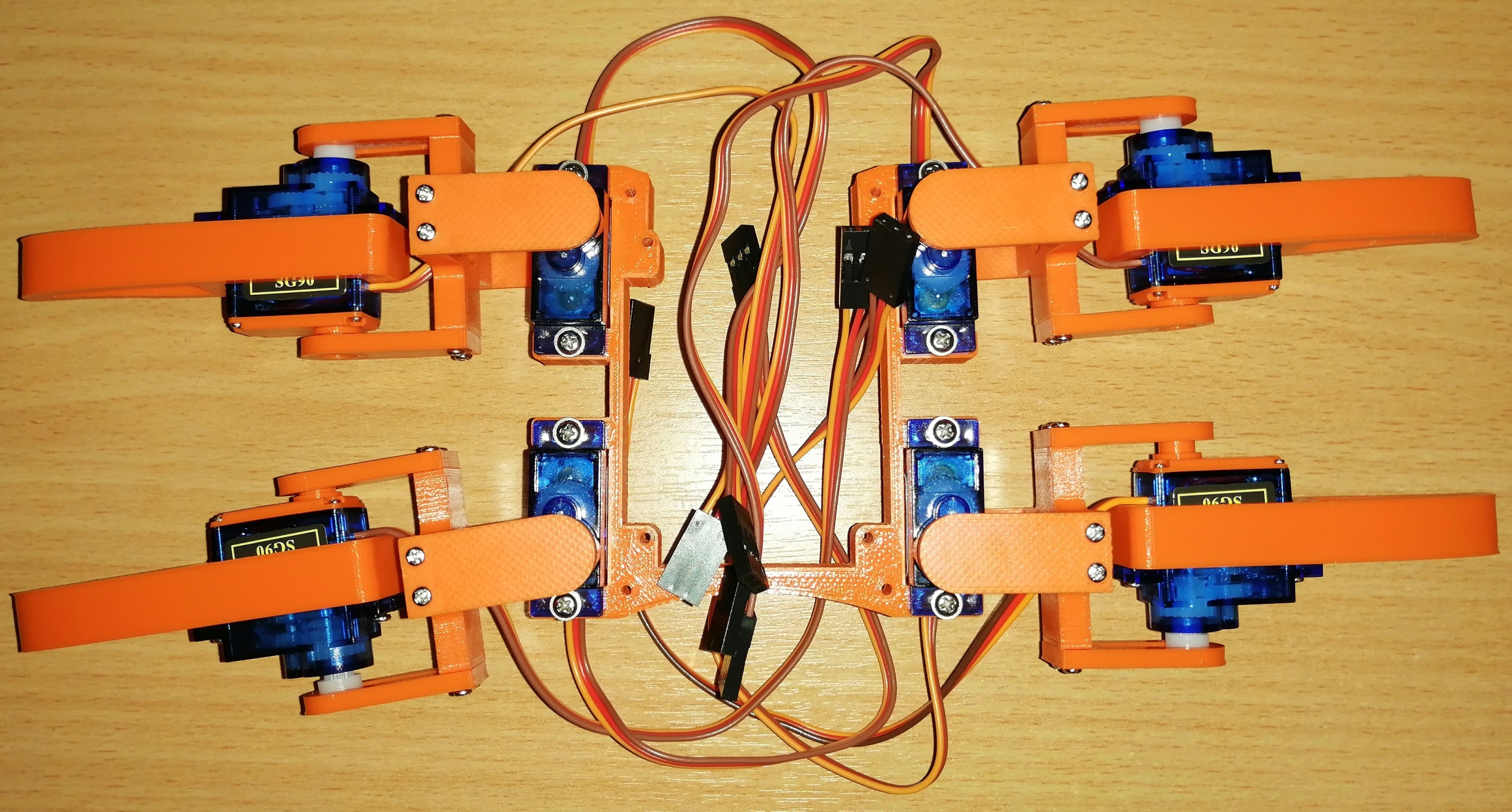
После этого собираем сервы и прикручиваем основания:
Дальше собираем ноги и основание:
Сервы к основанию прикручиваем комплектными саморезами, М1.7 болтались в отверстиях. Дальше продолжаем собирать ноги:
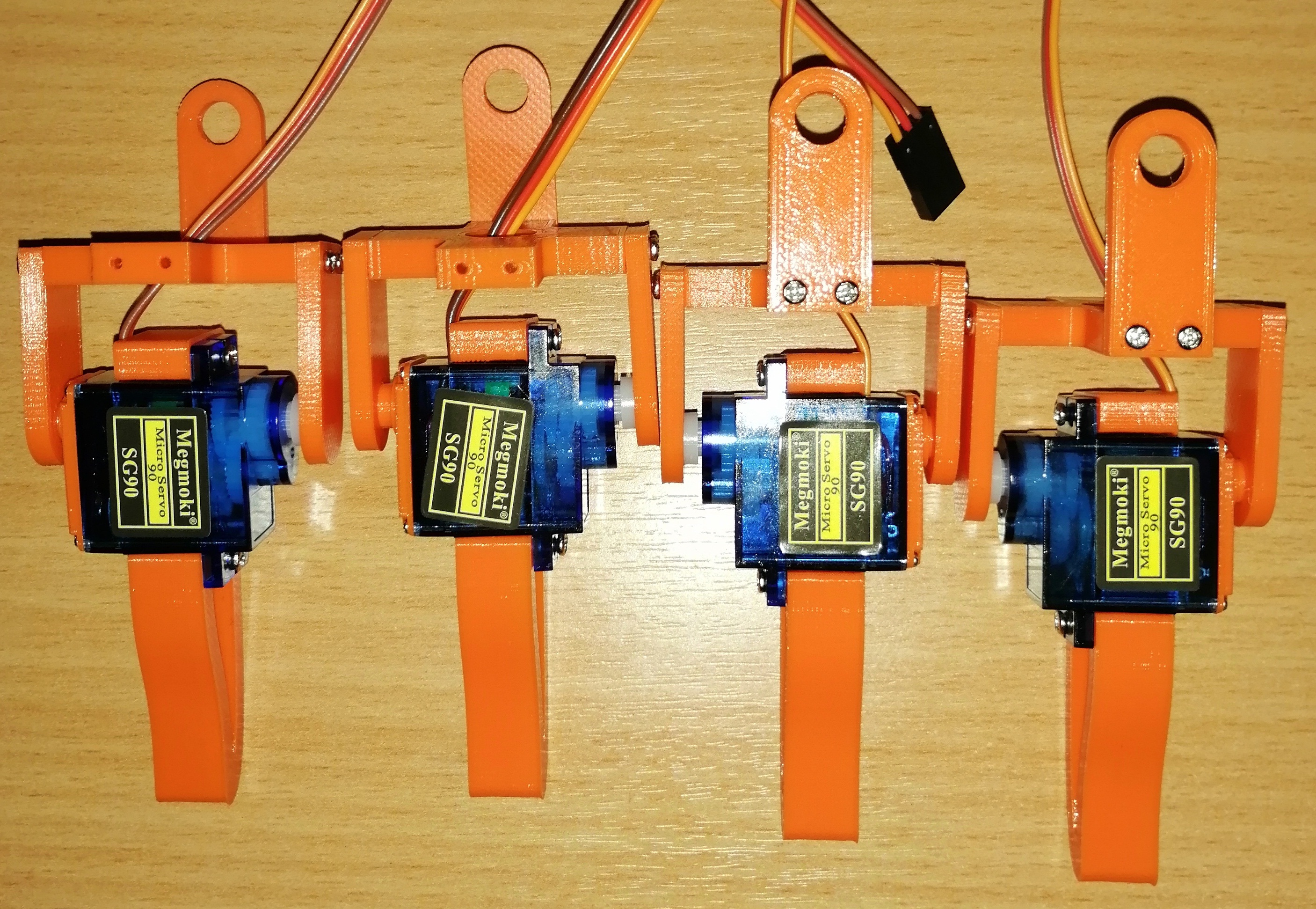
В «крестиках» проходим отверстия сверлом 1,5 мм, чтобы саморезы лучше закрутились.
Собираем ноги окончательно прикручиваем к основанию:
Последний шаг сборки – прикручиваем верхнюю и нижнюю крышки, предварительно в отверстия вставив кусочек поддержки от крышки, чтобы саморезы М1.7 притянули крышки:
На этом пока все. В следующей части будем собирать плату управления. Возникнут вопросы – пишите, постараюсь ответить. Поиск на Ali: | |
| Просмотров: 3934 | | 16.04.2019 | |










| Всего комментариев: 2 | |
|
| |
Использование материалов сайта допускается только при использовании ссылки на AVRproject.ru © 2011-2026
