| Привет! Кому интересно, что получится в итоге, читайте заключительную часть.
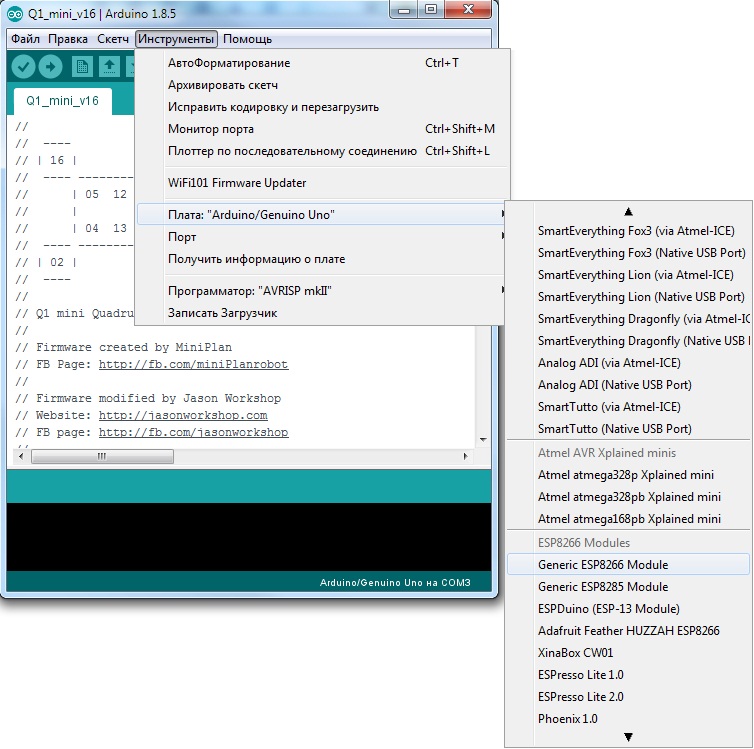
В силу разных обстоятельств выход третьей части затянулся и да, речь пойдет о прошивке ESP8266 в среде ARDUINO (АРДУИНО). Скажу сразу – я не ардуинщик, это четвертый раз, когда я столкнулся с этой средой (три проекта с одного ресурса). Начнём с установки среды и библиотек. Среду можно скачать по этой ссылке. Это портабельная версия 1.8.5 в zip-архиве. Распаковываем архив в c:\Program Files\ - все, среду установили. Переходим к установки библиотек. Для этого переходим по ссылке и делаем все, что пишет автор (лучше, как там расписано я не скажу, а переписывать не вижу смысла). Версию библиотеки выбирайте 2.4.2. В итоге мы установим библиотеки для ESP8266 и драйвера для CH340G. Теперь снова выбираем пункт меню Инструменты → Плата: “Arduino/Genuino Uno”
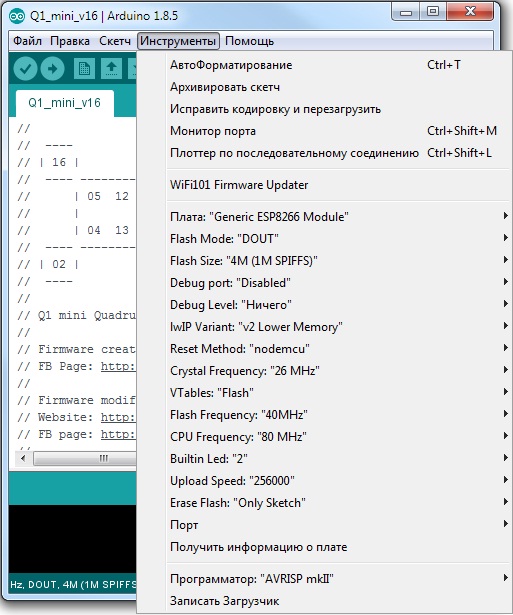
и выбираем плату “Generic ESP8266 Module”:
Выставляем настройки как на картинке выше. Все готово, можно прошивать. Открываем исходник, который скачали ранее и видим, что все на английском и китайском, соответственно и кнопки управления будут на английском. Это видно на видео из статьи. Лично мне это не подходит. А вам? Тогда открываем гугл-переводчик и вперед. Подключаем плату к ПК и перед подачей питания на плату, замыкаем GPIO0 на землю, как на фото:
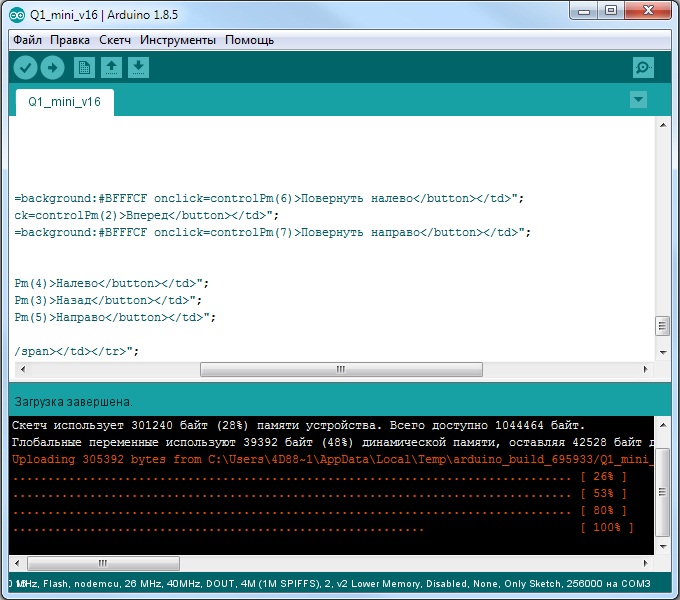
Светодиод на модуле мигнет три раза и потухнет, можно разомкнуть вывода. Жмём кнопку Загрузка:
Если всё прошло хорошо, то будет так:
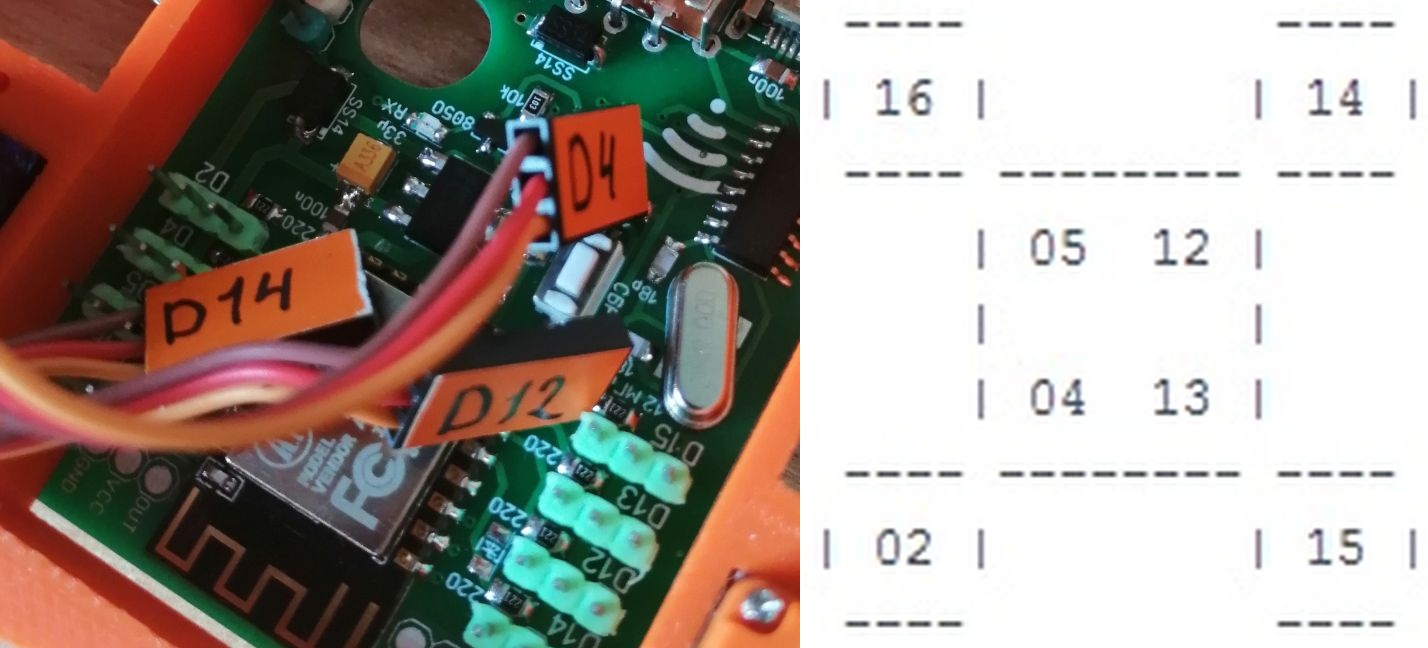
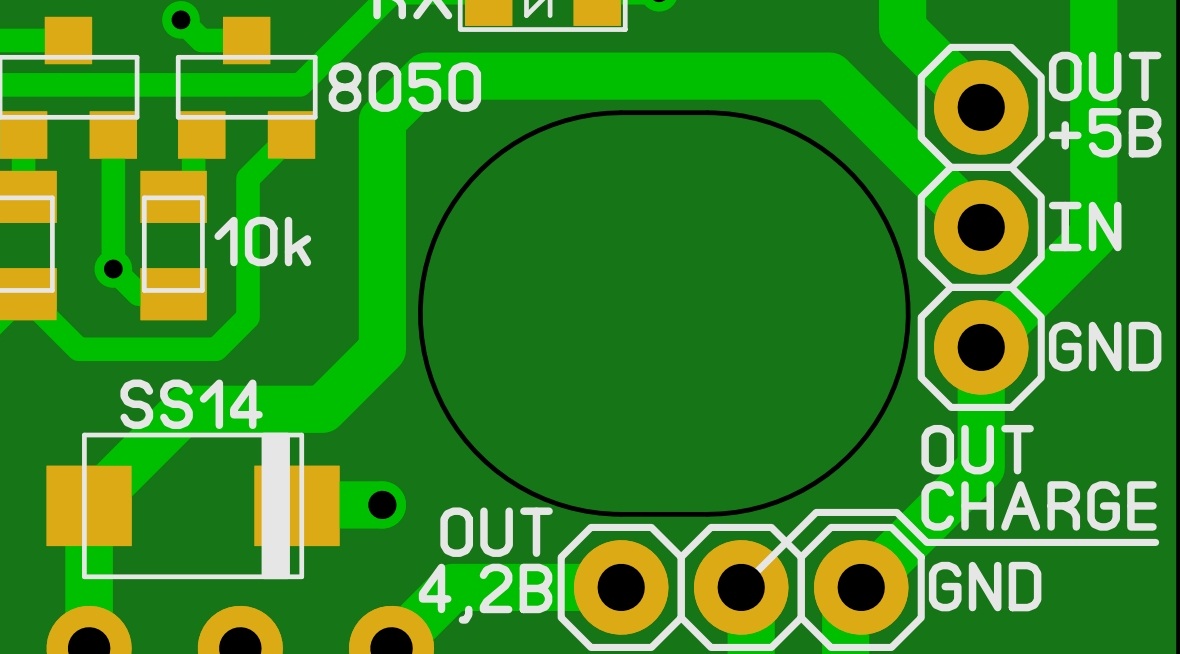
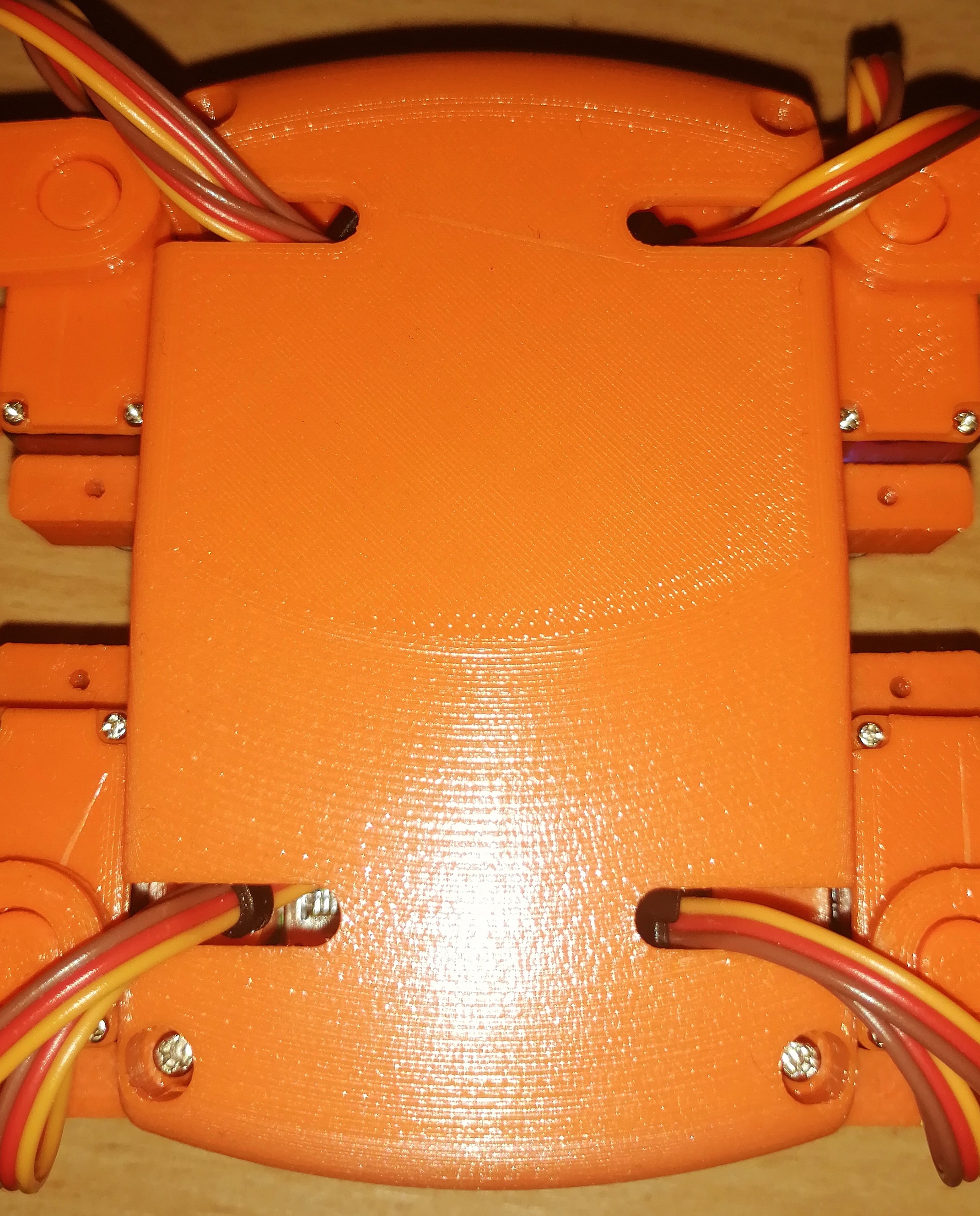
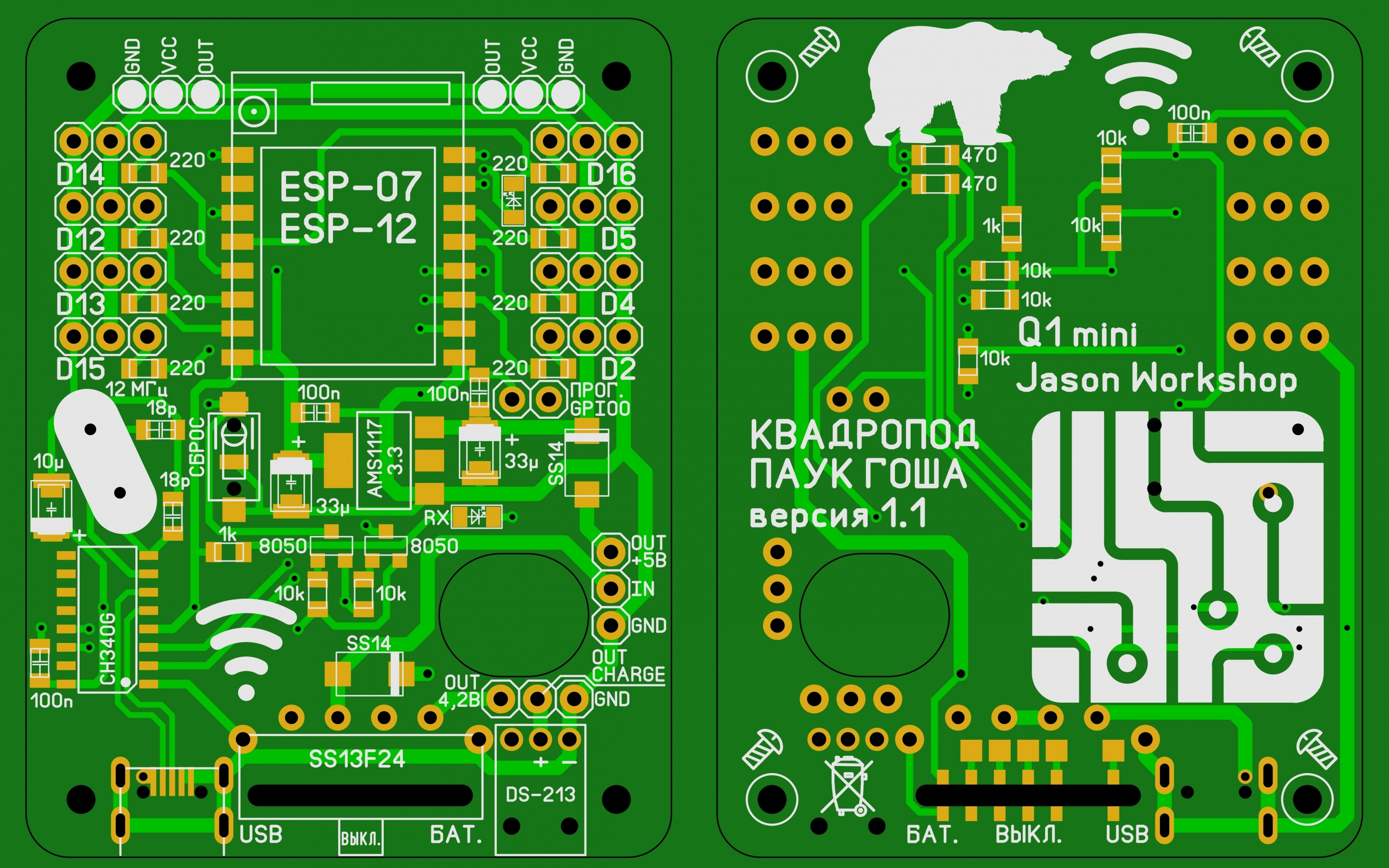
Если не хотите заморачиваться с ардуино, то можно прошить с помощью ESP8266 Flasher. Для этого качаем архив в конце статьи и делаем все по инструкции. Для удобства подключения серв, я их подписал, согласно схеме (вид сверху):
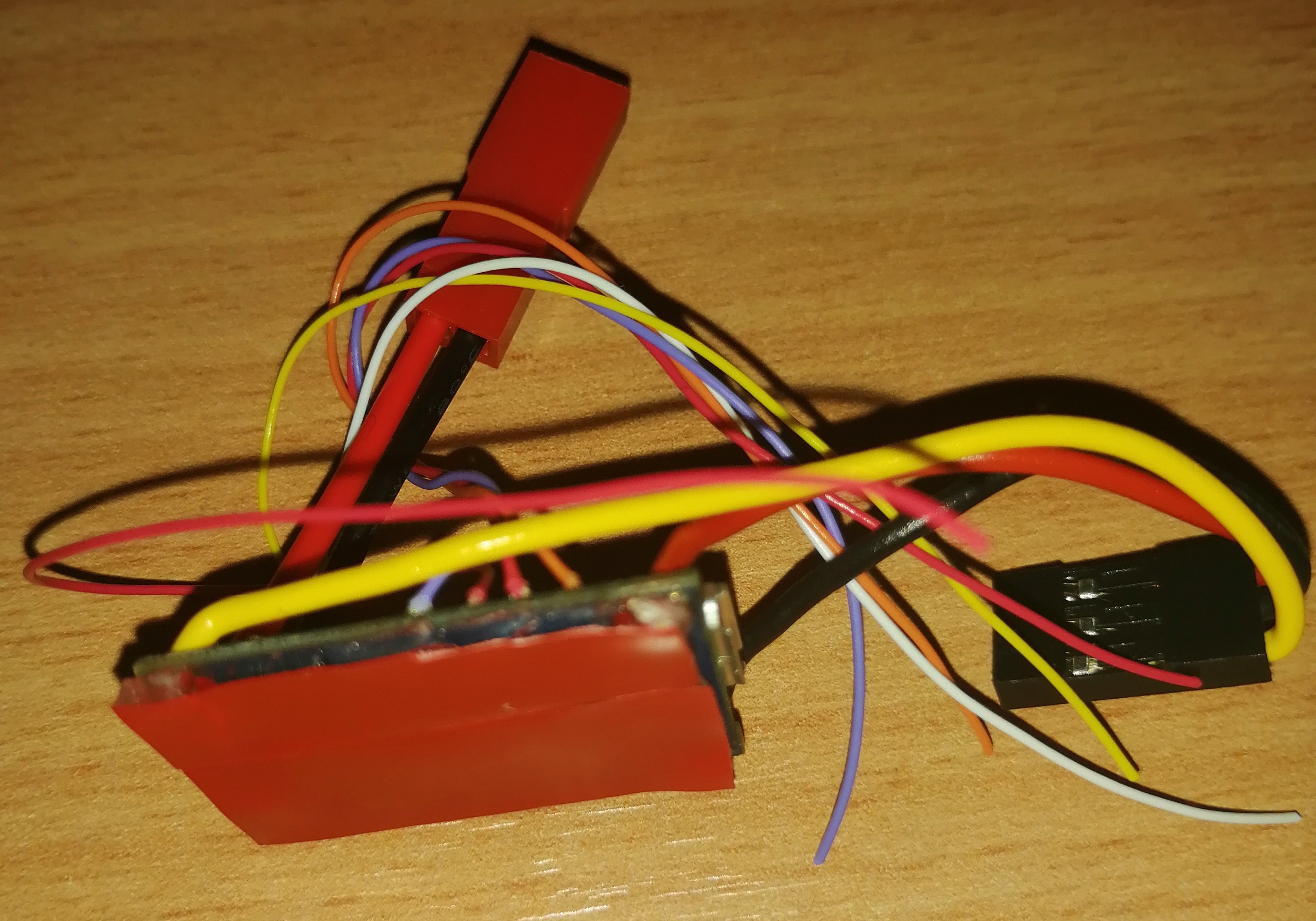
Плату прошили, сервы подключили, осталось подключить повышающий модуль и модуль заряда АКБ (ссылки на которые давал во второй части) вмести с ним. У себя в закромах нашел еще более мелкий повышающий модуль:
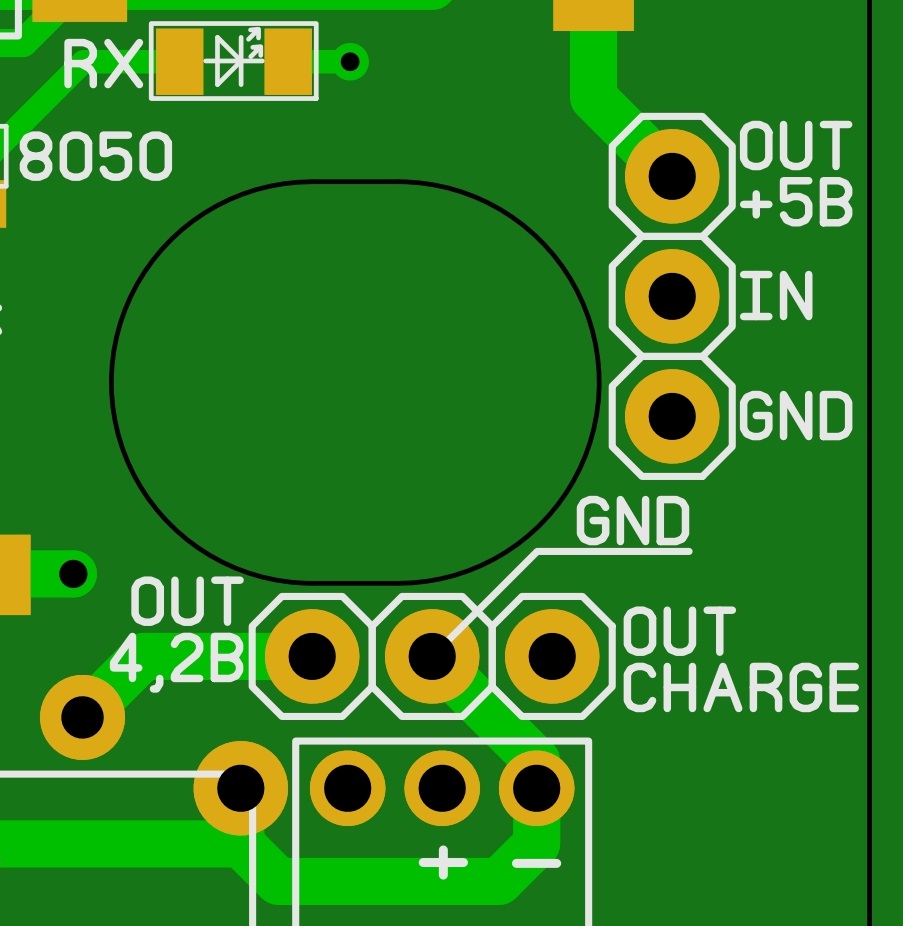
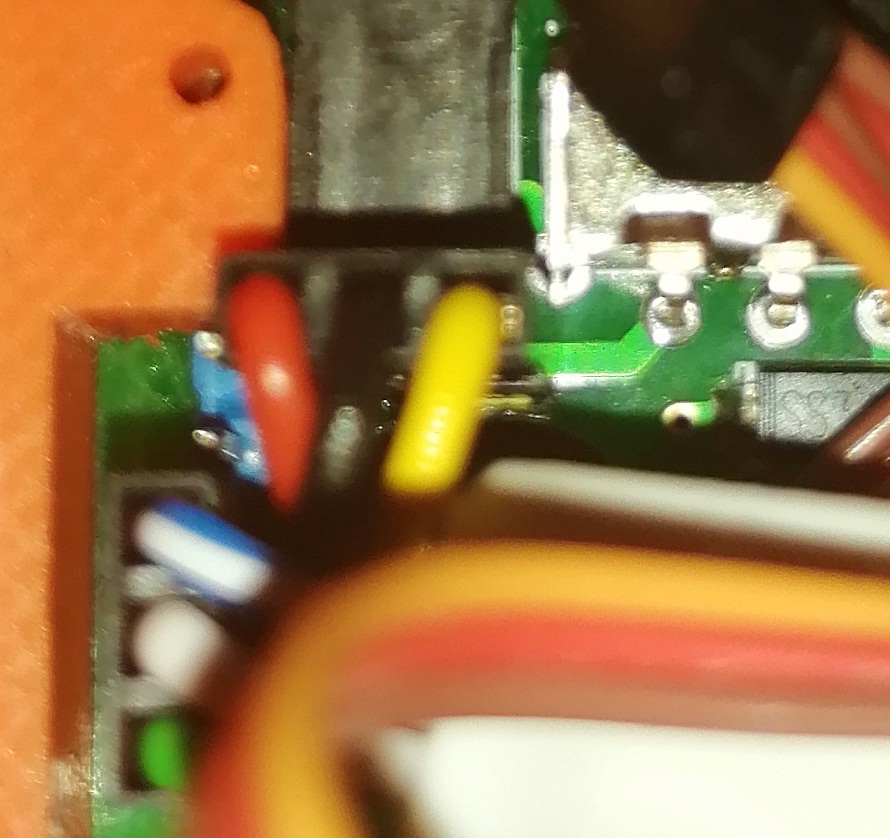
Кстати, про разъёмы, куда подключать модуля:
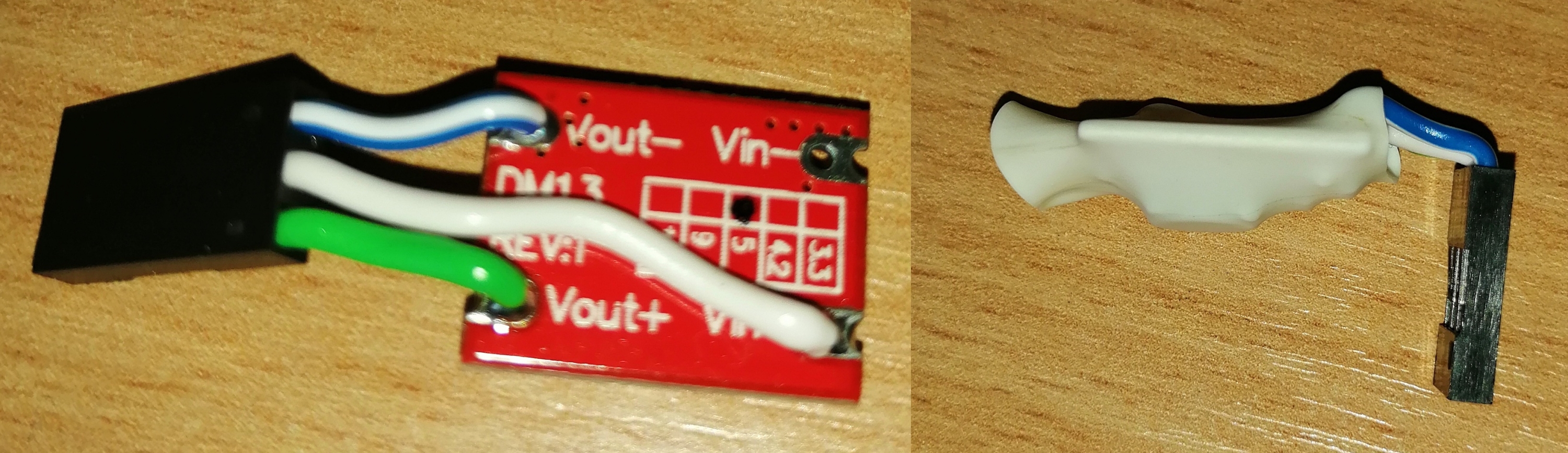
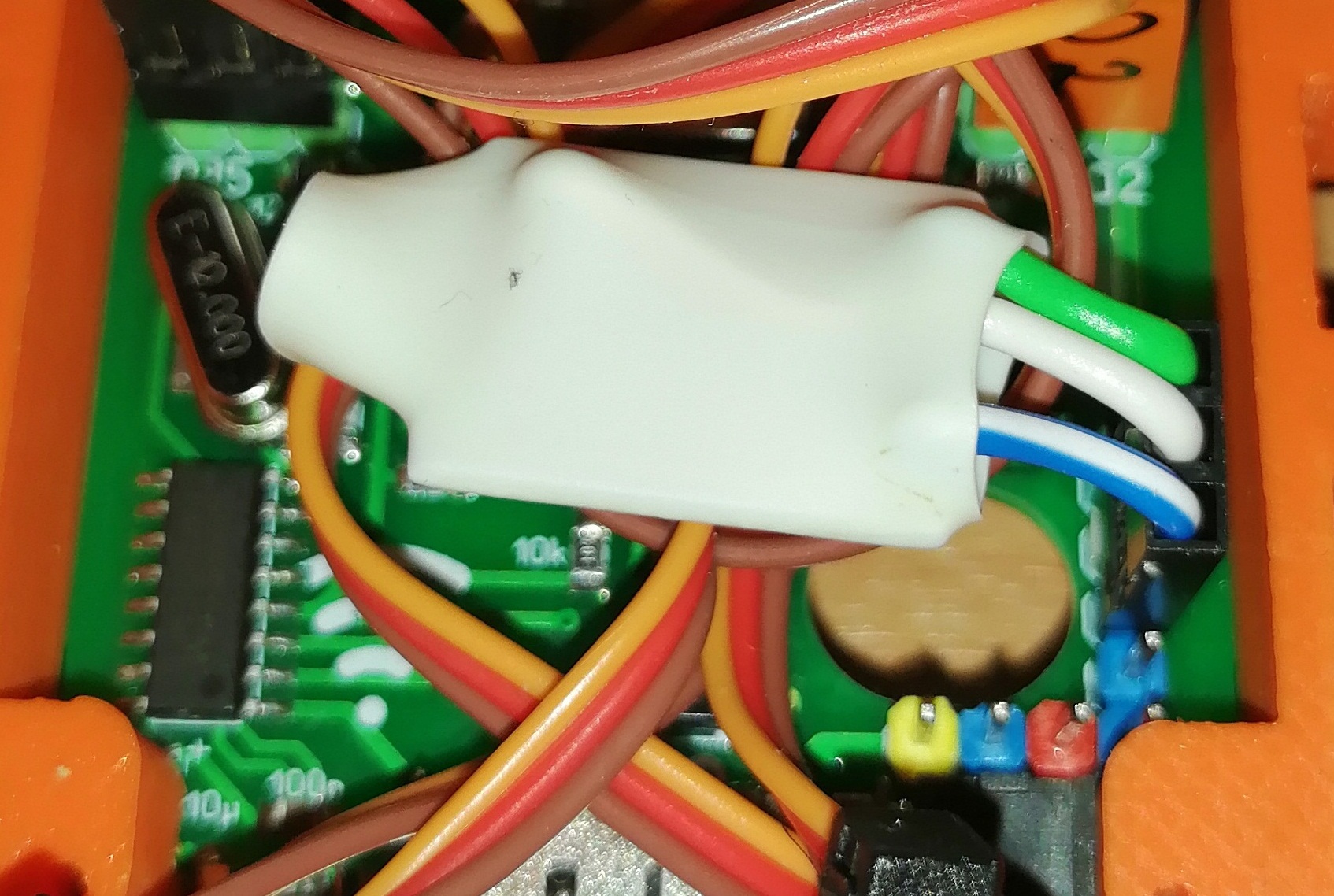
Припаиваем разъем, потом в термоусадку, чтобы ни чего не замкнуло и ставим на место:
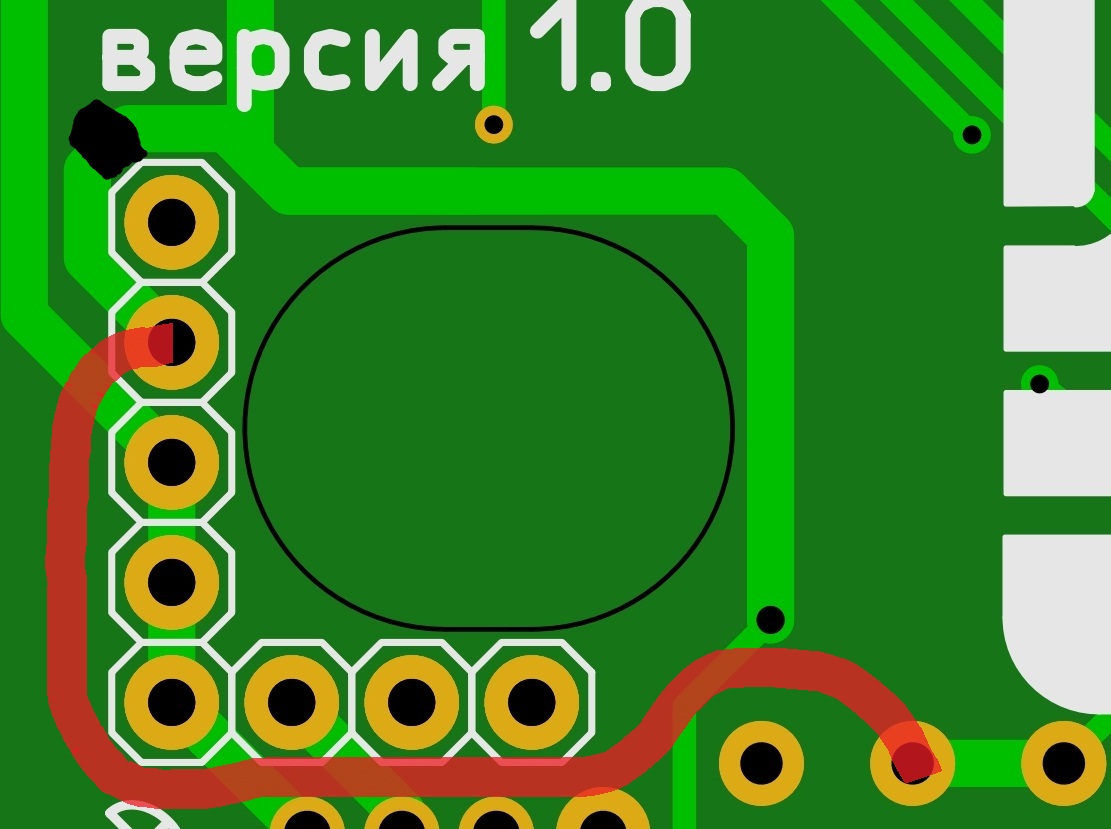
В ходе «полевых» испытаний выяснилось, что робот от АКБ не работает. Причиной стала не правильно разведенная дорожка питания. Было так:
Нужно так:
Берем ножик, паяльник и исправляем:
Где черное – разрезаем, где красное – соединяем. У меня так получилось:
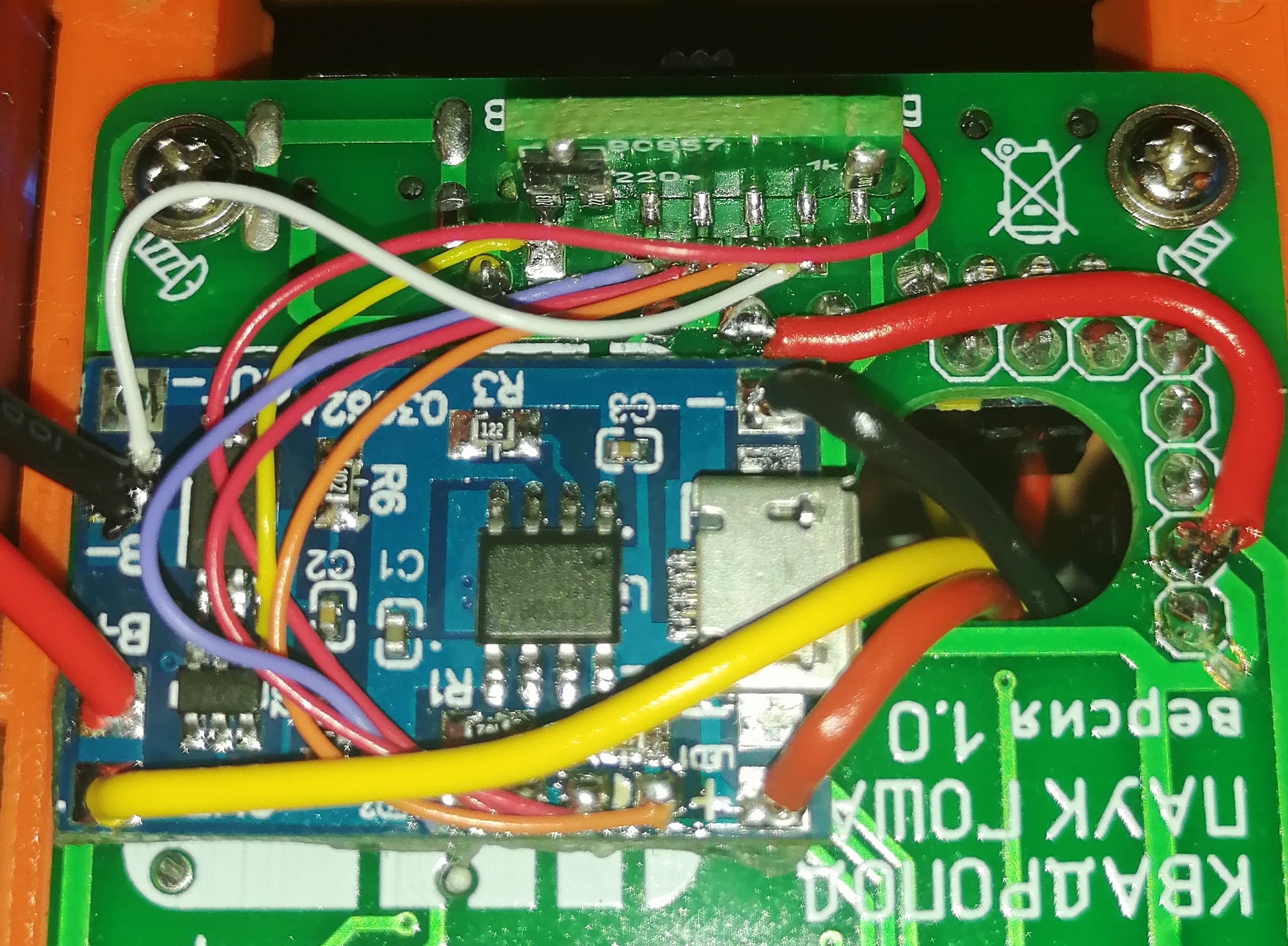
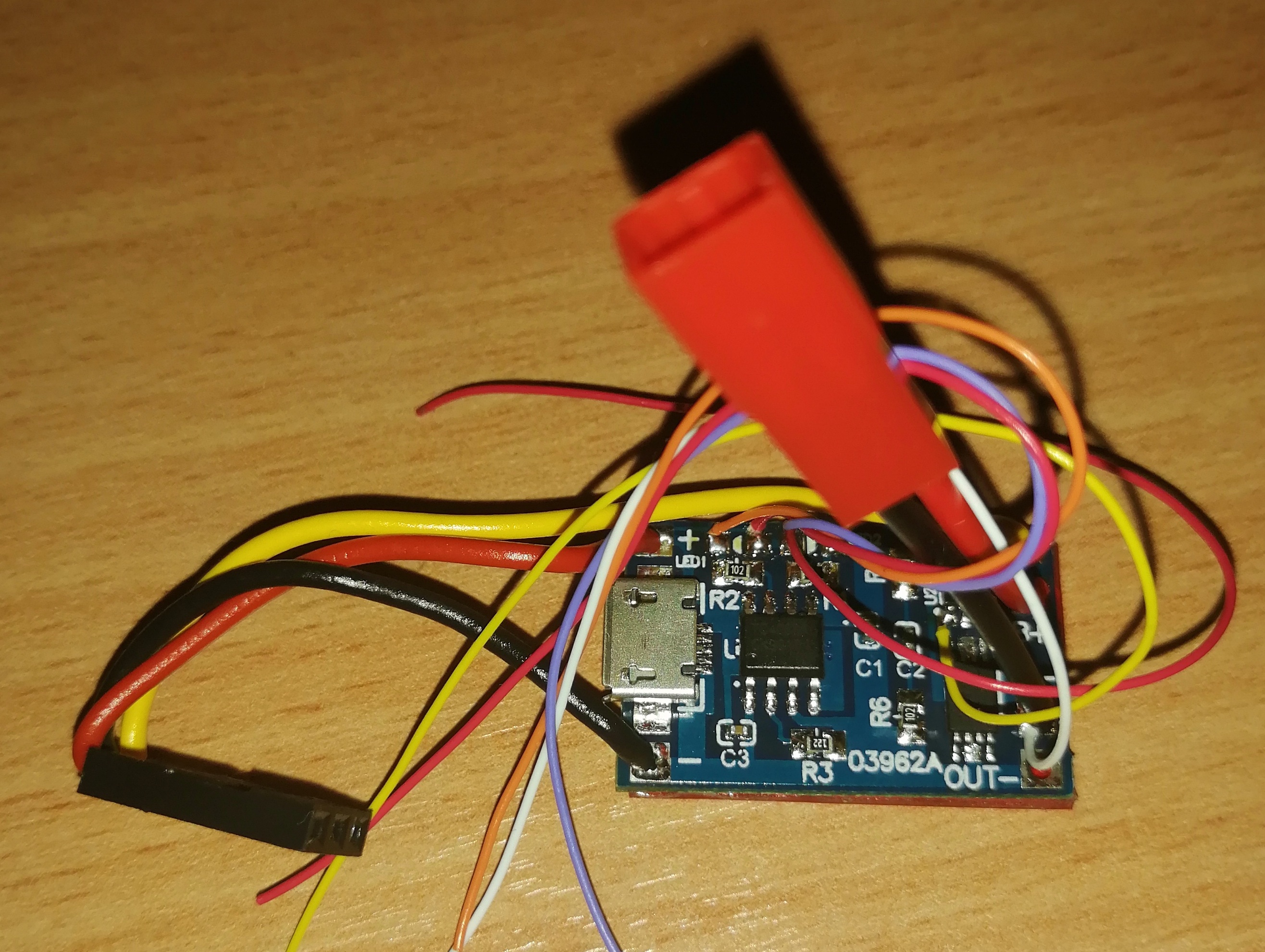
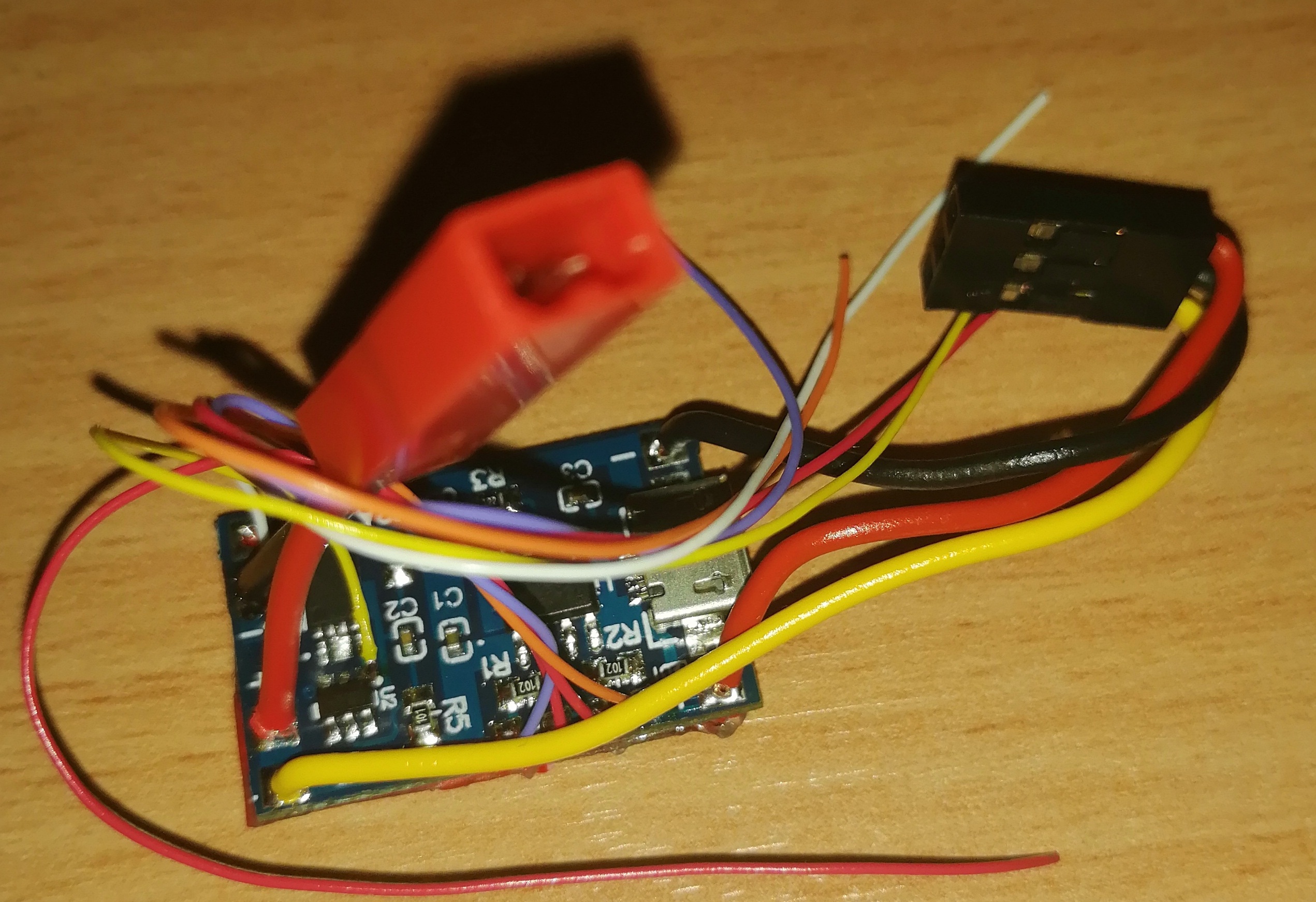
Теперь переходим к модулю заряда. Припаиваем разъемы для подключения к плате и АКБ, провода для индикации заряда, окончания заряда и разряда АКБ, приклеиваем двухсторонний скотч:
 Заодно и АКБ дорабатываем:
 Подключаем плату заряда, приклеиваем ее и припаиваем оставшиеся провода:
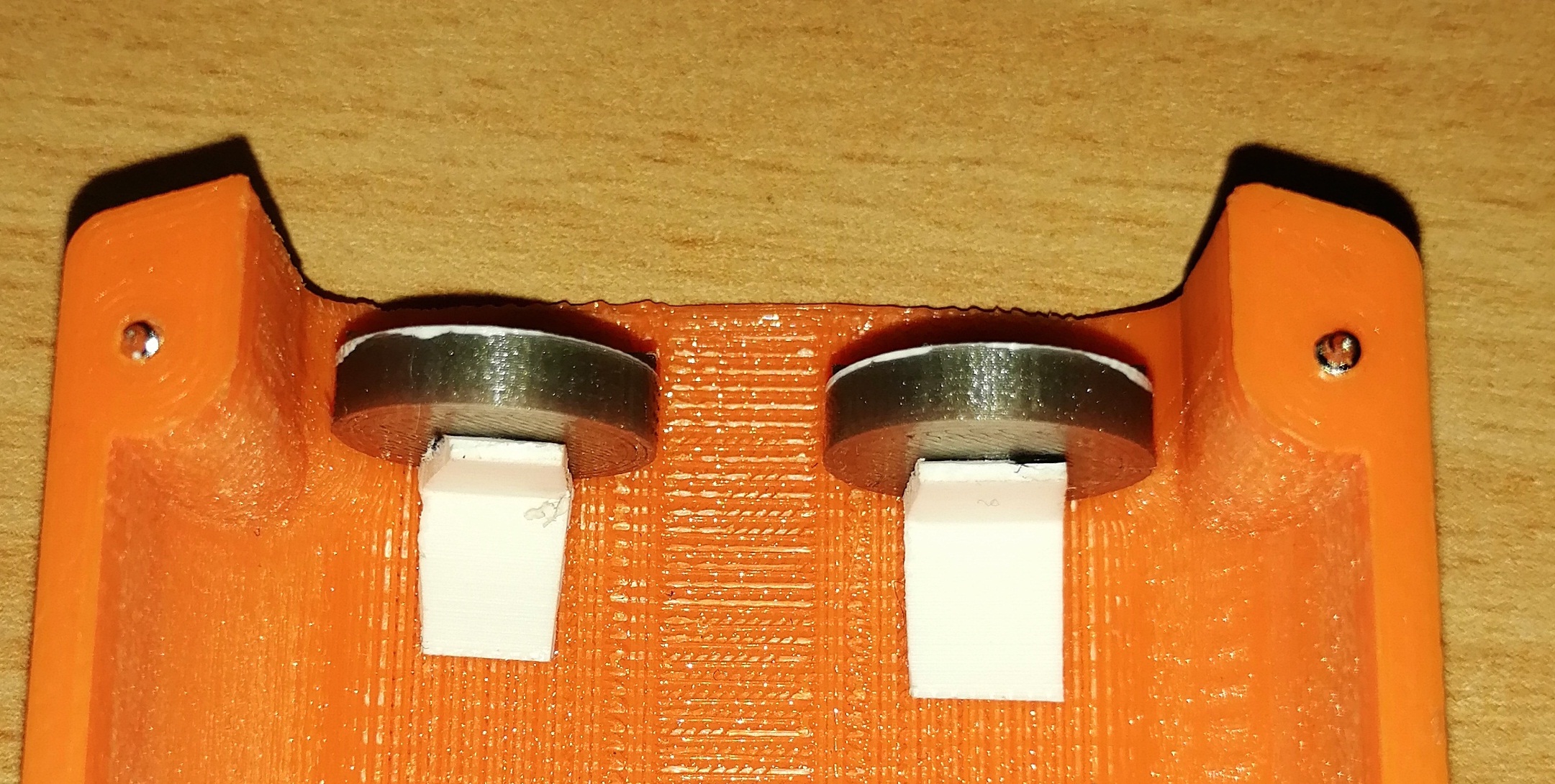
 Все, теперь можно прикрутить нижнюю крышку на место:
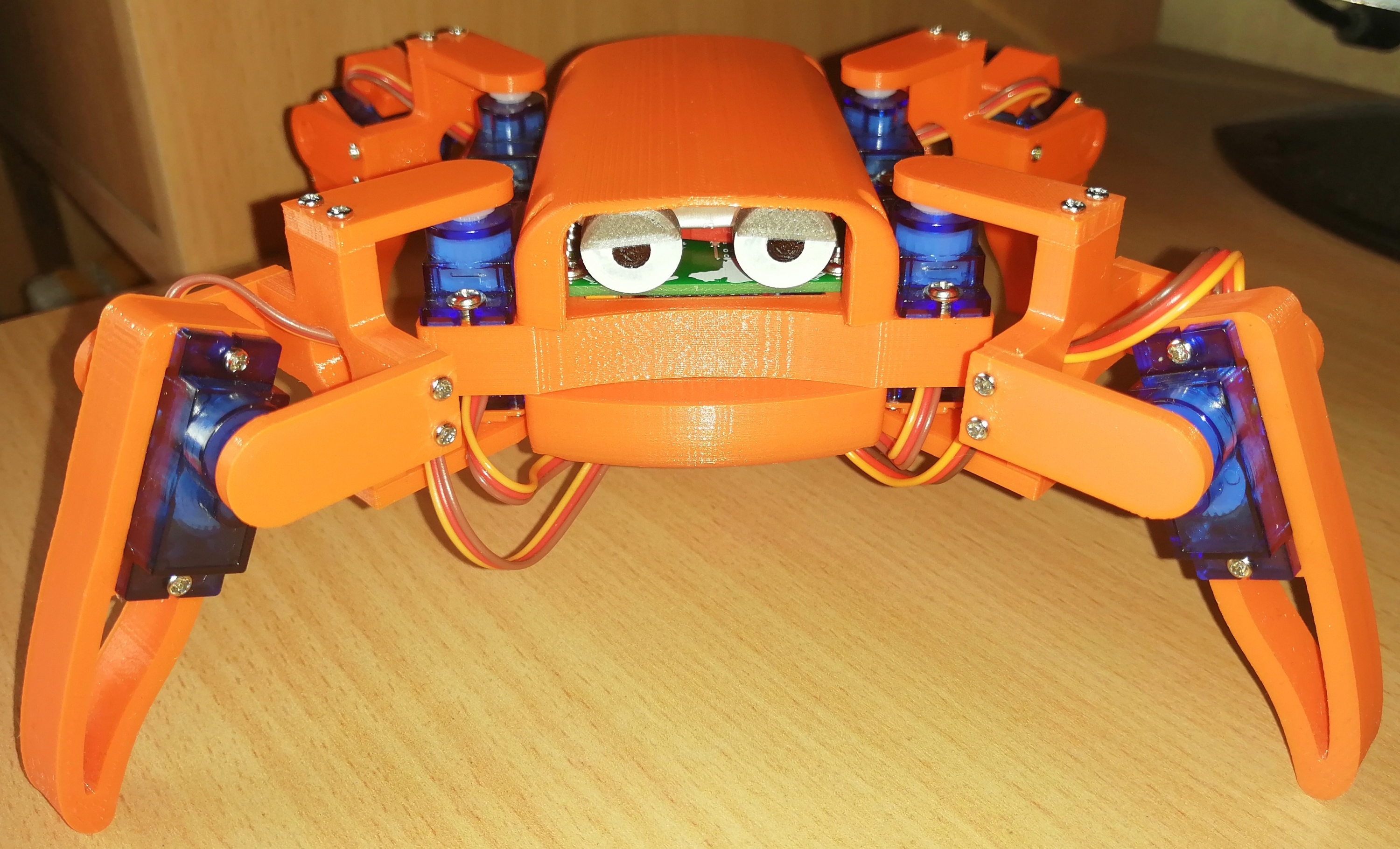
В первой части я говорил, что игрушки будет две. Так вот. Берем глаза робота из версии 2.0, раскрашиваем и приклеиваем к верхнее крышке:
 Подключаем АКБ к разъему, ложем в крышку (или приклеиваем на двухсторонний скотч к ней, если АКБ меньшего размера, чем применил я) и прикручиваем ее:
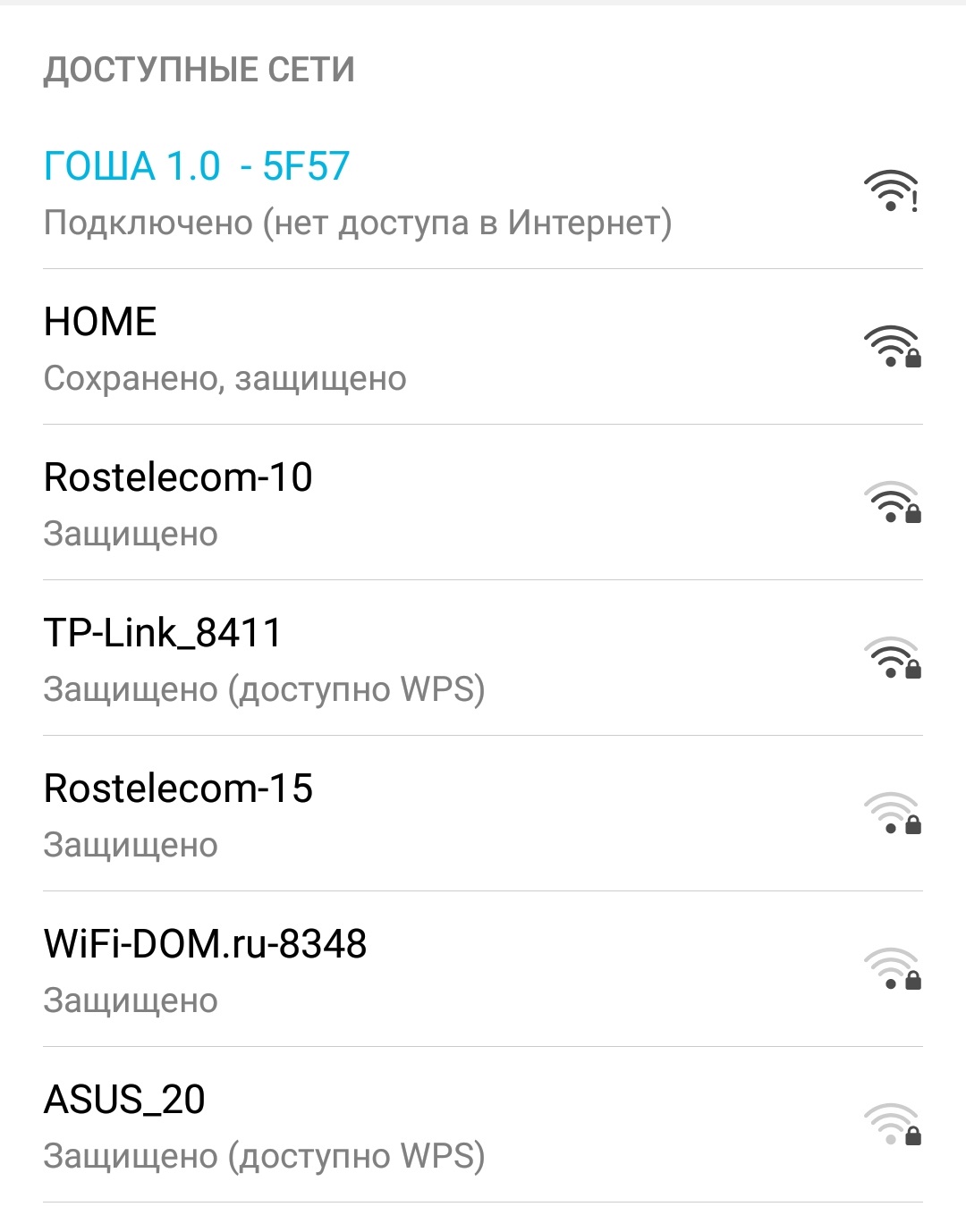
Все, теперь можно попробовать «оживить» нашего паука. Забегая вперед, скажу, что лучше это начать делать от зарядки от телефона/планшета или внешнего АКБ (Power Bank) с током выхода 2А. Подключаем «шнурок» к плате, подаем питание от USB, заходим в настройки Wi-Fi на телефоне/планшете и видим нашу сеть:
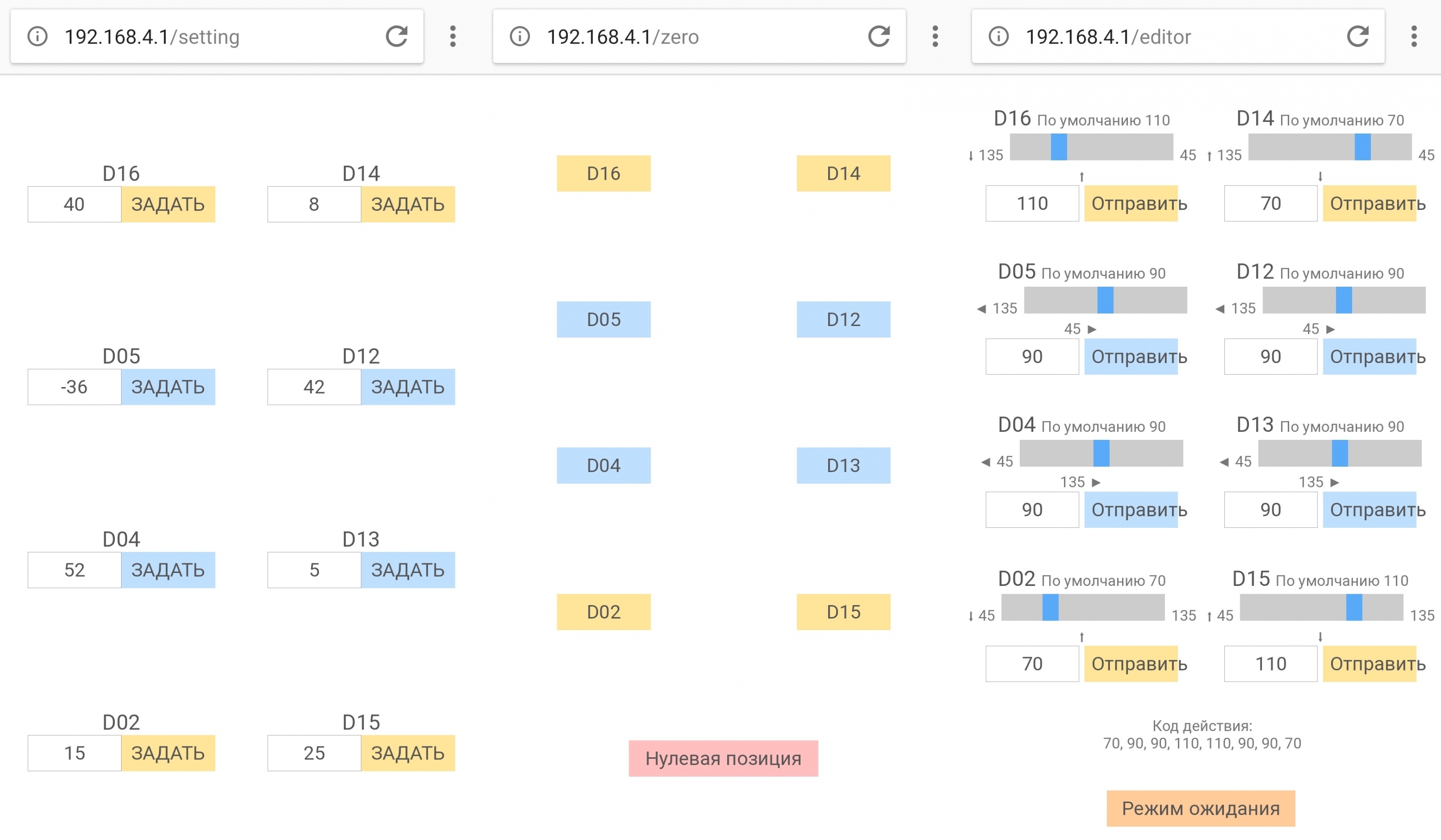
Для подключения к сети "ГОША 1.0 - 5F57", где 5F57 – это MAC-адрес конкретного модуля, нужно ввести пароль 12345678. Если хотите его сменить, в исходнике ищите в начале кода строку const char WiFiAPPSK[] и меняете его. Открываем браузер на телефоне/планшете и в поле адреса вводим 192.168.4.1 и жмём ввод. Загрузится страница:
Вообще, если к адресу добавить одну из строк /setting, /zero, /editor, то загрузятся такие страницы:
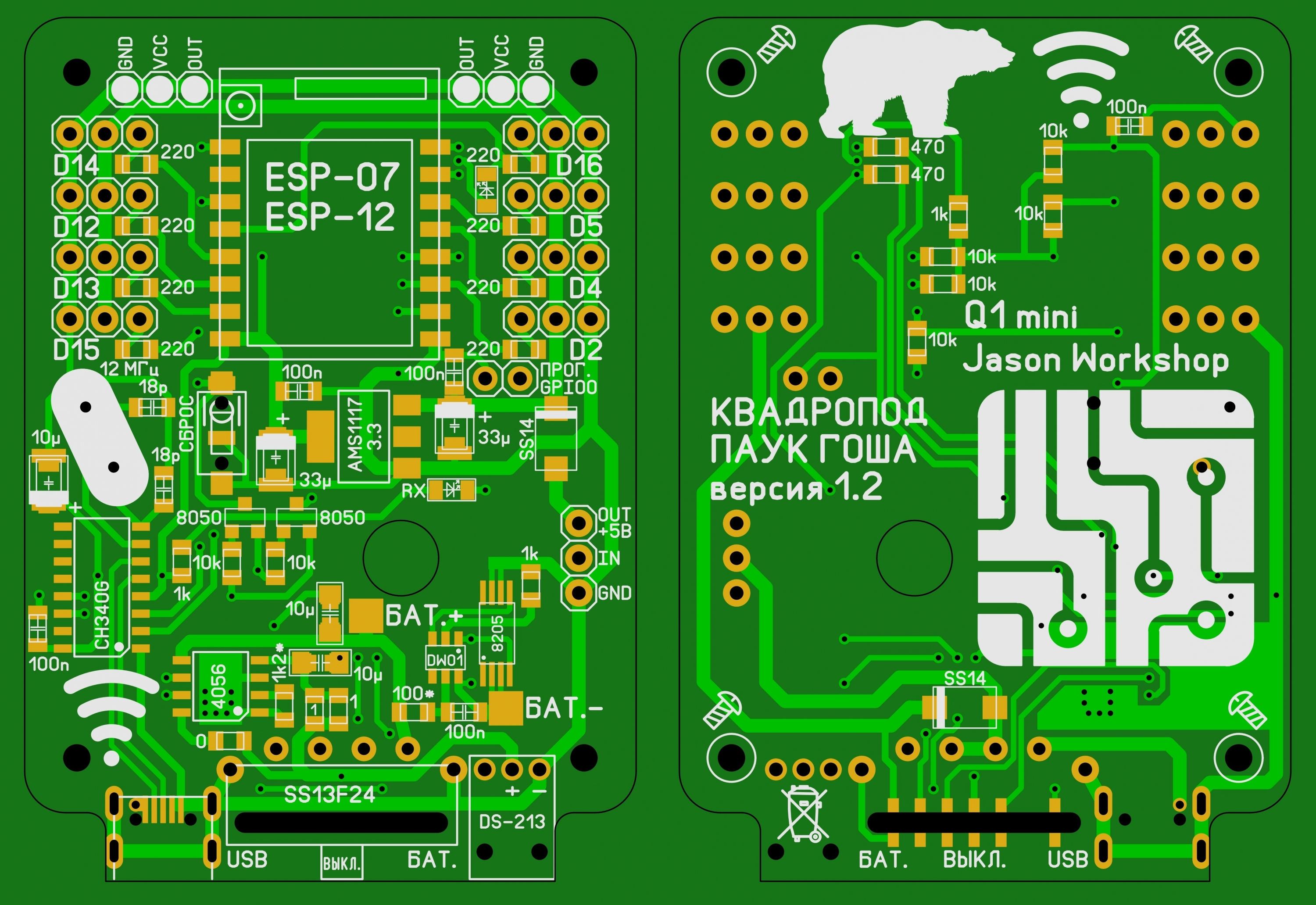
Для чего нужны остальные страницы? Для настройки положений сервоприводов. Итак. /setting – это настройка нулевого состояния сервоприводов, /zero – это проверка нулевого состояния сервоприводов, /editor – это редактор движения. Как говорится: «Лучше один раз увидеть…» Видео по настройке нулевого положения сервоприводов от автора робота: Ну и на последок видео, что в итоге получилось: На этом все! Всем удачи в сборке! Будут вопросы – пишите. P.S. В связи с выявленными недочетами плата была немного переделана:
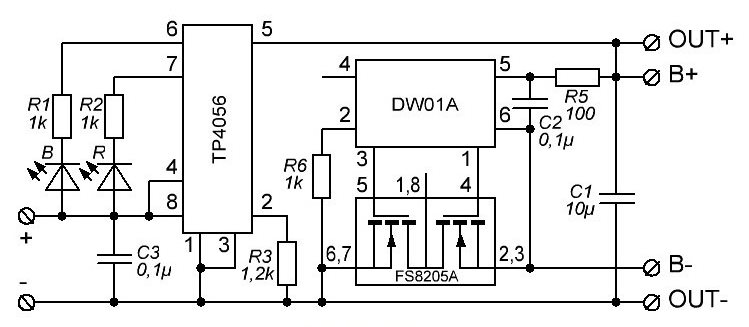
P.P.S. Принято решение контроллер заряда перенести на плату:
За основу контроллера заряда была взята эта схема:
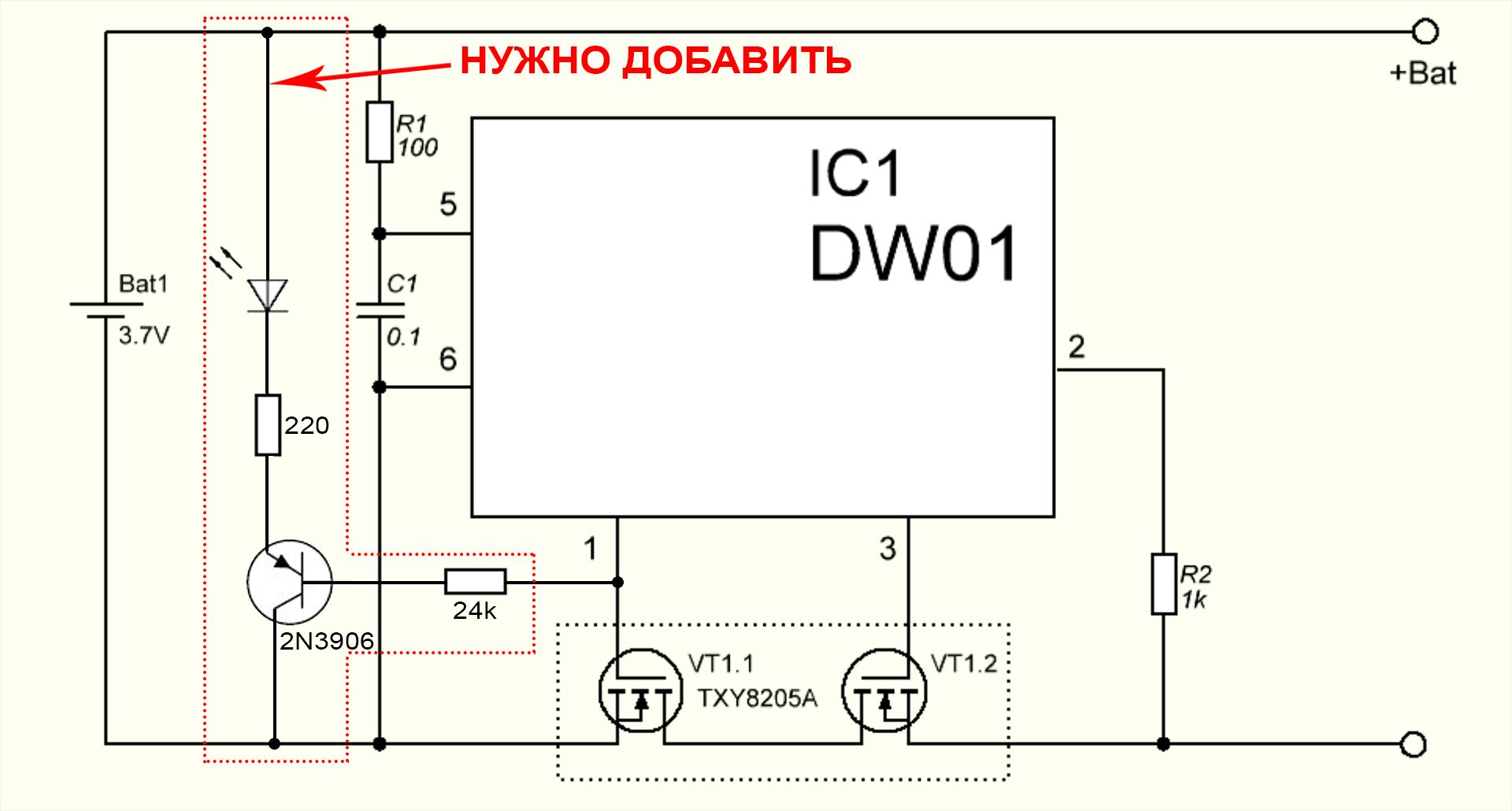
Индикатор разряда собран по такой схеме:
Все версии плат можно скачать в конце. P.P.P.S. В процессе эксплуатации были найдены кое-какие моменты работы контроллера заряда (точнее узла защиты от разряда/перезаряда), а именно уход в защиту при резком скачке нагрузки (все сервы потребляют в пике 1,6А). Чтобы этого избежать, перед подачей питания, лапы паука вручную перевожу в нулевое состояние (на видео видно), а управление начинаю с кнопки «Ожидание» или «2 танец». P.P.P.P.S. Заказал в Китае платы для Power Bank с выходом 5В / 2А. После прихода и проверке будет дополнение к статье. | |
| [ Скачать файлы (5.09 Mb) ] | |
| Просмотров: 4526 | | 27.05.2019 | |







| Всего комментариев: 3 | ||
| ||
Использование материалов сайта допускается только при использовании ссылки на AVRproject.ru © 2011-2025
